Systèmes d'équations linéaires
Nous avons déjà vu des méthodes pour résoudre des systèmes de deux équations linéaires à deux inconnues. Nous allons maintenant considérer des systèmes plus généraux et la manière dont ils peuvent être représentés à l'aide de matrices augmentées. Il s'agit d'une première approche de l'algèbre linéaire, une branche des mathématiques qui est à la base de nombreuses technologies modernes (informatique, ingénierie, physique, économie, etc.).
Systèmes d'équations linéaires
Définition Équation linéaire
Une équation linéaire dans les variables \(x_1, x_2, \dots, x_n\) est une équation qui peut s'écrire sous la forme$$ a_1x_1 + a_2x_2 + \dots + a_nx_n = b $$où \(a_1, a_2, \dots, a_n\) et \(b\) sont des constantes. Une solution de l'équation est un ensemble de valeurs des variables qui rend l'équation vraie.
Définition Système d'équations linéaires
Un système de \(m\) équations linéaires à \(n\) inconnues, \(x_1,x_2,\dots,x_n\), peut s'écrire sous la forme$$\left\{\begin{array}{rcrcrcrcl}a_{11}x_1 & + & a_{12}x_2 &+& \dots &+ & a_{1n}x_n &=& b_1 \\
a_{21}x_1 & + & a_{22}x_2 &+& \dots &+ & a_{2n}x_n &=& b_2 \\
\vdots & & \vdots & & \dots & & \vdots & & \vdots \\
a_{m1}x_1 & + & a_{m2}x_2 &+& \dots &+ & a_{mn}x_n &=& b_m \\
\end{array}\right.$$Une solution du système est un ensemble de valeurs des variables qui vérifie simultanément toutes les équations du système.
Représentations de l'ensemble des solutions
L'ensemble de toutes les solutions d'un système d'équations linéaires peut être représenté de plusieurs façons. Les formes les plus courantes sont :
- l'équation cartésienne (ou explicite),
- la forme paramétrique,
- la forme vectorielle.
Définition Types de solutions
Un système d'équations linéaires est :
- compatible s'il a au moins une solution,
- incompatible s'il n'a pas de solution.
Exemple
Montrer que le système d'équations suivant est incompatible :$$\left\{\begin{array}{rcrcr}x & + & y & = & 3 \\
2x & + & 2y & = & 8\end{array}\right.$$
Si nous prenons la deuxième équation et que nous la divisons par 2, nous obtenons$$ \frac{2x+2y}{2} = \frac{8}{2} \implies x+y = 4. $$Le système est donc équivalent à$$\left\{\begin{array}{rcrcr}x & + & y & = & 3 \\
x & + & y & = & 4\end{array}\right.$$C'est une contradiction, car \(x+y\) ne peut pas être égal à la fois à 3 et à 4. Par conséquent, le système n'a pas de solution et est incompatible.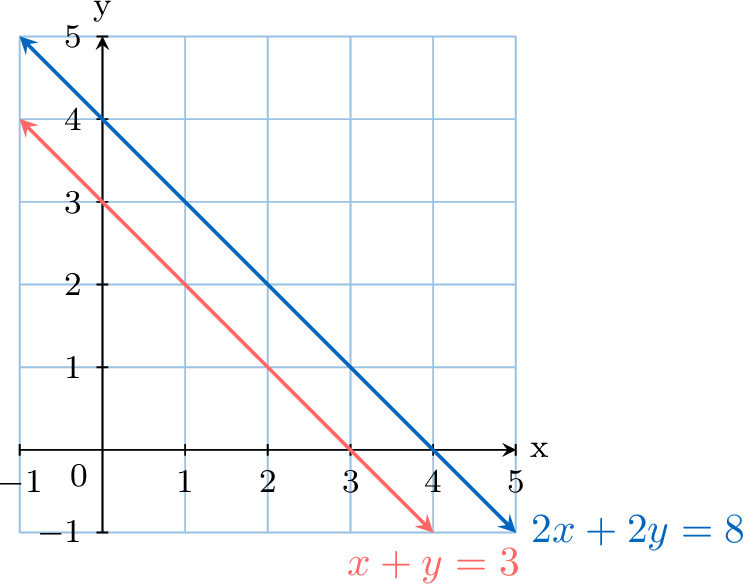
Proposition Interprétation géométrique des solutions en 2D
Dans un espace à 2 dimensions avec les variables \((x, y)\) :
- L'ensemble des solutions d'une seule équation linéaire est une droite. Les solutions peuvent être décrites à l'aide d'un paramètre.
- L'ensemble des solutions d'un système de deux équations linéaires non parallèles est un point. La solution est unique.
Exemple
Considérons l'équation linéaire \(2x+y=1\). Géométriquement, son ensemble de solutions est une droite dans le plan.
- Forme paramétrique
On introduit un paramètre \(t\) et on pose \(x=t\). En substituant dans l'équation,$$ 2t+y=1 \implies y=1-2t. $$La solution générale sous forme paramétrique est$$ \boldsymbol{(x, y) = (t, 1-2t)}, \quad t \in \mathbb{R}. $$ - Forme vectorielle
On écrit la solution sous forme vectorielle :$$\begin{pmatrix} x \\ y \end{pmatrix}= \underbrace{\begin{pmatrix} 0 \\ 1 \end{pmatrix}}_{\text{vecteur position}}+ t \underbrace{\begin{pmatrix} 1 \\ -2 \end{pmatrix}}_{\text{vecteur directeur}.}$$Tout point \(\begin{pmatrix} x \\ y \end{pmatrix}\) de la droite s'obtient en partant du point fixe \((0,1)\) et en se déplaçant de \(t\) fois le vecteur directeur \(\begin{pmatrix}1\\-2\end{pmatrix}\).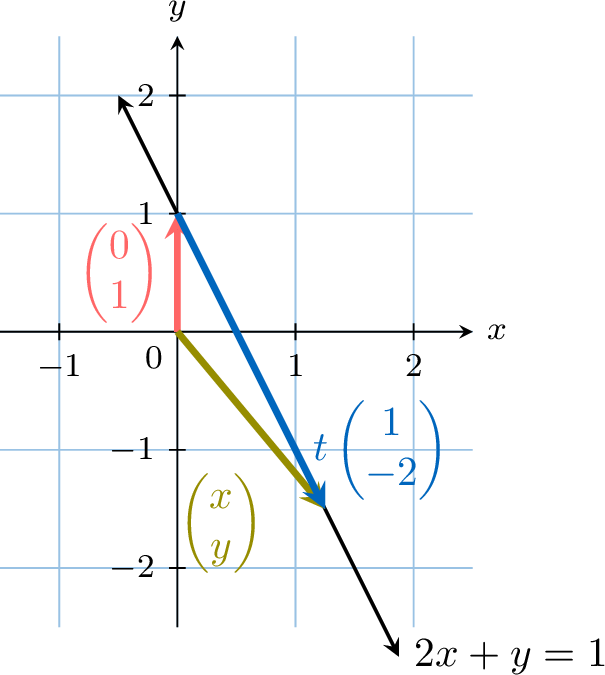
Proposition Interprétation géométrique des solutions en 3D
Dans un espace à 3 dimensions avec les variables \((x, y, z)\) :
- L'ensemble des solutions d'une seule équation linéaire est un plan. Les solutions peuvent être décrites à l'aide de deux paramètres.
- L'ensemble des solutions d'un système de deux équations linéaires non parallèles et non confondues est une droite : la droite d'intersection des deux plans. Les solutions peuvent être décrites à l'aide d'un paramètre.
Exemple
Considérons l'équation \(x + 2y + 3z = 6\). Géométriquement, cela représente un plan dans l'espace 3D.
- Forme paramétrique
Nous avons besoin de deux paramètres. Posons \(y=s\) et \(z=t\). Alors$$ x + 2s + 3t = 6 \implies x = 6 - 2s - 3t. $$La solution générale sous forme paramétrique est$$ \boldsymbol{(x, y, z) = (6 - 2s - 3t, s, t)}, \quad s,t \in \mathbb{R}. $$ - Forme vectorielle
On écrit la solution sous forme d'équation vectorielle :$$\begin{pmatrix} x \\ y \\ z \end{pmatrix}= \underbrace{\begin{pmatrix} 6 \\ 0 \\ 0 \end{pmatrix}}_{\text{vecteur position}} + s \underbrace{\begin{pmatrix} -2 \\ 1 \\ 0 \end{pmatrix}}_{\text{vecteur directeur 1}} + t \underbrace{\begin{pmatrix} -3 \\ 0 \\ 1 \end{pmatrix}}_{\text{vecteur directeur 2}}.$$Tout point du plan s'obtient en partant du point \((6,0,0)\) et en se déplaçant selon une combinaison des deux vecteurs directeurs.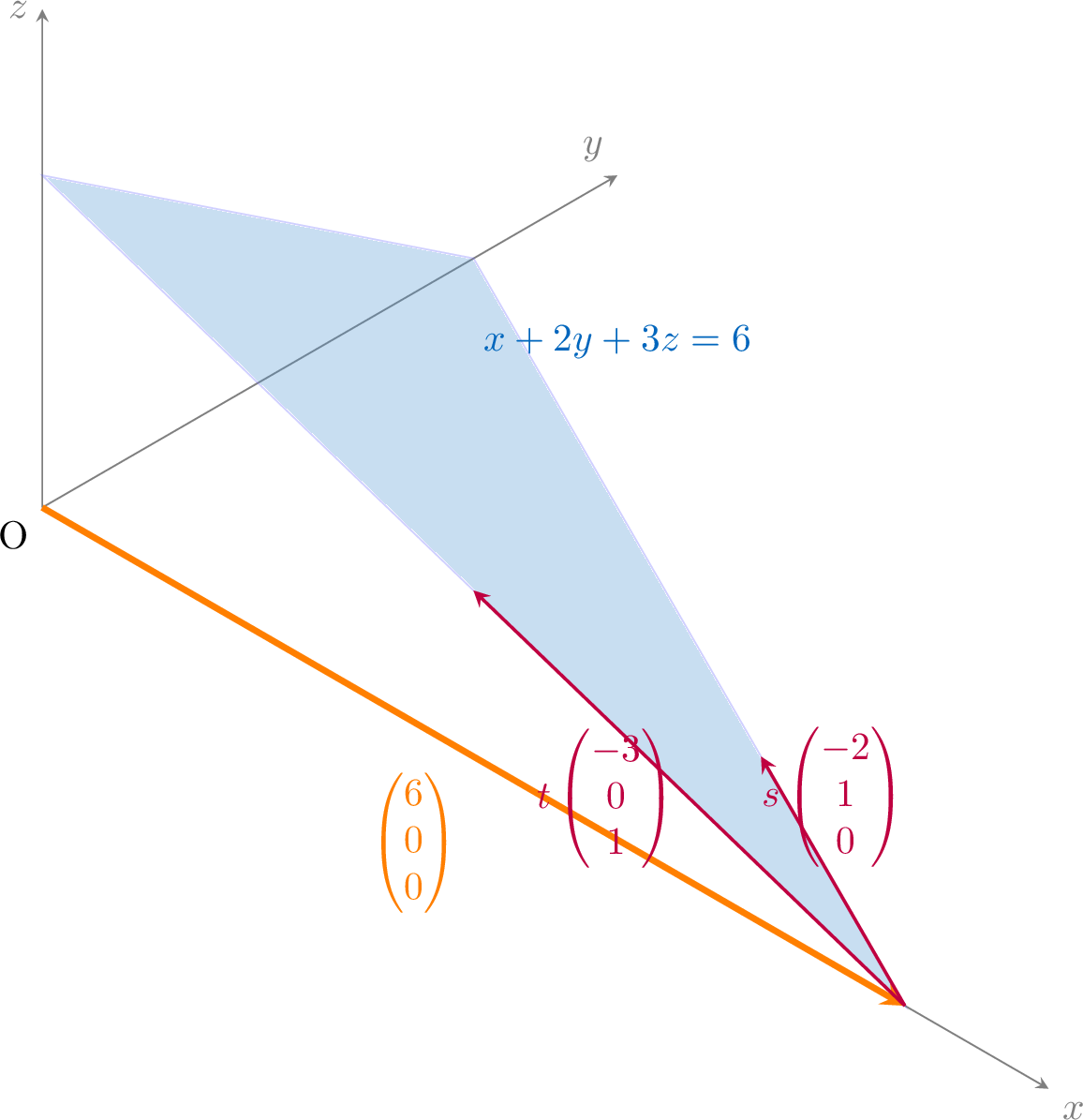
Exemple
Considérons le système :$$\left\{\begin{array}{rcrcrcl}x &+& y &+& z &=& 3 \\
x &-& y &+& 2z &=& 2\end{array}\right.$$Géométriquement, ce sont deux plans dans l'espace 3D. S'ils ne sont pas parallèles et ne sont pas confondus, leur ensemble de solutions est la droite où ils se coupent.
- Forme paramétrique
On additionne les deux équations pour éliminer \(y\) :$$ 2x + 3z = 5. $$On introduit un paramètre \(t\) en posant \(z=t\) :$$ 2x + 3t = 5 \implies x = \frac{5}{2} - \frac{3}{2}t. $$En remplaçant \(x\) et \(z\) dans la première équation, on obtient$$ \left(\frac{5}{2} - \frac{3}{2}t\right) + y + t = 3 \implies y = \frac{1}{2} + \frac{1}{2}t. $$La solution paramétrique est$$ \boldsymbol{(x, y, z) = \left(\frac{5}{2} - \frac{3}{2}t,\ \frac{1}{2} + \frac{1}{2}t,\ t\right)}, \quad t \in \mathbb{R}. $$ - Forme vectorielle
On écrit la solution comme une équation vectorielle :$$\begin{pmatrix} x \\ y \\ z \end{pmatrix}= \underbrace{\begin{pmatrix} 5/2 \\ 1/2 \\ 0 \end{pmatrix}}_{\text{vecteur position}} + t \underbrace{\begin{pmatrix} -3/2 \\ 1/2 \\ 1 \end{pmatrix}}_{\text{vecteur directeur}}.$$C'est l'équation vectorielle de la droite d'intersection des deux plans.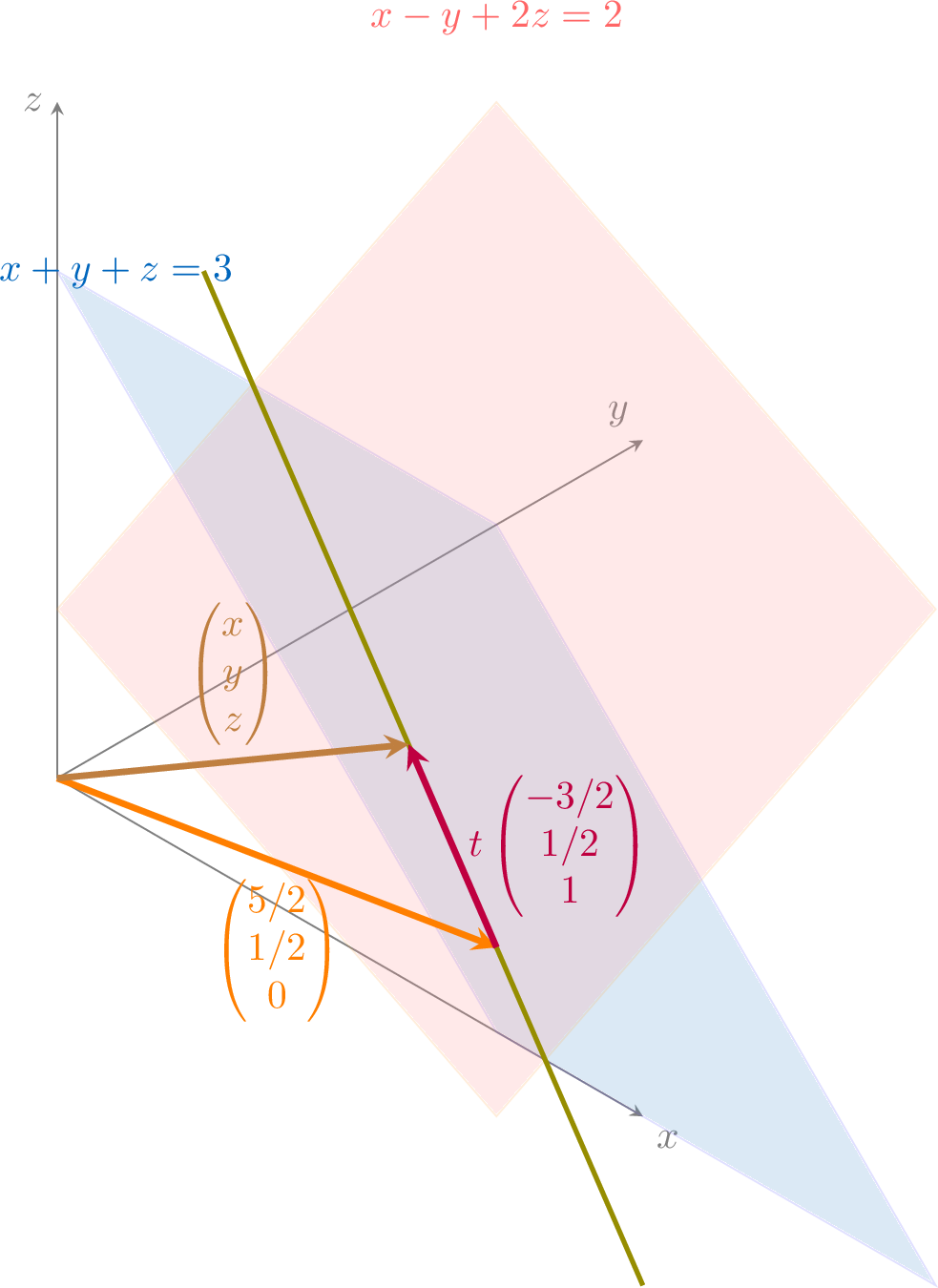
Matrices augmentées
Une matrice augmentée est une façon compacte d’écrire un système linéaire afin d’effectuer des calculs rapides et systématiques.
Définition Matrice augmentée
Un système de \(m\) équations linéaires à \(n\) inconnues peut être représenté par un tableau rectangulaire de nombres appelé une matrice augmentée. Pour le système général$$\left\{\begin{array}{rcrcrcrcl}a_{11}x_1 & + & a_{12}x_2 &+& \dots &+ & a_{1n}x_n &=& b_1 \\
a_{21}x_1 & + & a_{22}x_2 &+& \dots &+ & a_{2n}x_n &=& b_2 \\
\vdots & & \vdots & & \dots & & \vdots & & \vdots \\
a_{m1}x_1 & + & a_{m2}x_2 &+& \dots &+ & a_{mn}x_n &=& b_m \\
\end{array}\right.$$la matrice augmentée est$$\left[ \begin{array}{cccc|c}a_{11} & a_{12} & \dots & a_{1n} & b_1 \\
a_{21} & a_{22} & \dots & a_{2n} & b_2 \\
\vdots & \vdots & \ddots & \vdots & \vdots \\
a_{m1} & a_{m2} & \dots & a_{mn} & b_m\end{array} \right].$$
Exemple
Écrire la matrice augmentée pour le système d'équations linéaires suivant :$$\left\{\begin{array}{rcrcrcr}2x &-& y &+& z &=& -1 \\
x & & &+& 3z &=& 4 \\
-x &+& 2y &-& z &=& 0\end{array}\right.$$
Le système a trois variables (\(x, y, z\)) et trois équations. Chaque colonne correspond aux coefficients d'une variable. Si une variable n'apparaît pas dans une équation, son coefficient est 0.
La matrice augmentée est$$\left[ \begin{array}{ccc|c}2 & -1 & 1 & -1 \\ 1 & 0 & 3 & 4 \\ -1 & 2 & -1 & 0\end{array} \right].$$
La matrice augmentée est$$\left[ \begin{array}{ccc|c}2 & -1 & 1 & -1 \\ 1 & 0 & 3 & 4 \\ -1 & 2 & -1 & 0\end{array} \right].$$
Opérations élémentaires sur les lignes
De notre étude des équations simultanées, nous savons que nous pouvons effectuer certaines opérations sans changer l'ensemble des solutions du système :
- Échanger deux équations
Par exemple, \(\left\{ \begin{array}{rcrcrc} 2x&+& y &=& -1 \\ x &-& 3y &=& 2 \\ \end{array}\right.\) a les mêmes solutions que \(\left\{ \begin{array}{rcrcrc} x &-& 3y &=& 2 \\ 2x&+& y &=& -1 \qquad \scriptstyle (L_1 \leftrightarrow L_2) \end{array}\right.\) - Remplacer une équation par un multiple non nul d'elle-même
Par exemple, \(\left\{ \begin{array}{rcrcrc} x &-& 3y &=& 2 \\ 2x&+& y &=& -1 \end{array}\right.\) a les mêmes solutions que \(\left\{ \begin{array}{rcrcrc} 2x &-& 6y &=& 4 \qquad \scriptstyle (L_1 \leftarrow 2L_1) \\ 2x&+& y &=& -1 \end{array}\right.\) - Remplacer une équation par la somme d'elle-même et d'un multiple d'une autre équation
Par exemple, \(\left\{ \begin{array}{rcrcrc} x &-& 3y &=& 2 \\ 2x&+& y &=& -1 \end{array}\right.\) a les mêmes solutions que \(\left\{ \begin{array}{rcrcrc} x &-& 3y &=& 2 \\ & & 7y &=& -5 \qquad \scriptstyle (L_2 \leftarrow L_2 - 2L_1) \end{array}\right.\), comme le montre le calcul : $$\begin{array}{rcrl} 2x + y &=& -1 &\scriptstyle L_2 \\ -2x + 6y &=& -4& \scriptstyle -2 L_1 \\ \hline 7y &=& -5 & \scriptstyle L_2-2L_1 \end{array}$$
Proposition Opérations élémentaires sur les lignes
Pour résoudre un système à l'aide de sa matrice augmentée, nous utilisons des opérations élémentaires sur les lignes pour transformer la matrice en une forme plus simple et équivalente. Ces opérations ne modifient pas l'ensemble des solutions du système.
- Échanger deux lignes (\(L_i \leftrightarrow L_j\)).
- Multiplier une ligne par une constante non nulle (\(L_i \leftarrow kL_i\)).
- Ajouter un multiple d'une ligne à une autre ligne (\(L_i \leftarrow L_i + kL_j\)).
Élimination de Gauss
L'élimination de Gauss est le processus qui consiste à utiliser des opérations élémentaires sur les lignes pour résoudre systématiquement un système d'équations linéaires. L'objectif est de transformer la matrice augmentée en forme échelonnée.
Méthode Résoudre un système par élimination de Gauss
- Matrice augmentée : Écrire le système d'équations sous forme de matrice augmentée.

- Forme échelonnée : Utiliser des opérations sur les lignes pour créer un triangle de zéros en bas à gauche de la matrice (zéros sous chaque pivot).

- Forme échelonnée réduite (optionnel) : Continuer les opérations sur les lignes pour créer des zéros au-dessus des pivots et pour rendre chaque pivot égal à 1. Ainsi, la matrice des coefficients devient la matrice identité.

- Lire la solution : La matrice finale donne directement la solution du système :

Exemple
Utiliser l'élimination de Gauss pour résoudre :$$\left\{\begin{array}{rcrcr}x & + & y & = & -1 \\
2x & + & 4y & = & 6\end{array}\right.$$
$$\begin{aligned} & \left\{\begin{array}{rcrcr}x & + & y & = & -1 \\
2x & + & 4y & = & 6\end{array}\right.\\
\sim\;&\left[ \begin{array}{cc|c}1 & 1 & -1 \\
2 & 4 & 6\end{array} \right]\quad (\text{écrire la matrice augmentée})\\
\sim\;&\left[ \begin{array}{cc|c}1 & 1 & -1 \\
0 & 2 & 8\end{array} \right]\begin{array}{l} \\
\scriptstyle L_2\leftarrow L_2 - 2L_1\end{array}\quad (\text{créer un zéro sous le pivot})\\
\sim\;&\left[ \begin{array}{cc|c}1 & 1 & -1 \\
0 & 1 & 4\end{array} \right]\begin{array}{l} \\
\scriptstyle L_2 \leftarrow \frac{1}{2}L_2\end{array}\quad (\text{rendre le pivot de la ligne 2 égal à 1})\\
\sim\;&\left[ \begin{array}{cc|c}1 & 0 & -5 \\
0 & 1 & 4\end{array} \right]\begin{array}{l}\scriptstyle L_1 \leftarrow L_1-L_2 \\
\;\end{array}\quad (\text{créer un zéro au-dessus du pivot de la ligne 2}) \\
\sim\;&\left\{\begin{array}{rcrcr}x & & & = & -5 \\
& & y & = & 4\end{array}\right.\quad (\text{lire la solution})\end{aligned}$$
Analyse des solutions à partir de la forme échelonnée
Une fois qu'une matrice augmentée est réduite en forme échelonnée, on peut déterminer le type de l'ensemble des solutions sans aller forcément jusqu'à la forme échelonnée réduite. L'idée est d'observer les pivots et la dernière colonne.
Dans une matrice échelonnée :
Dans une matrice échelonnée :
- Un pivot est la première entrée non nulle d'une ligne.
- Une variable de pivot est une variable dont la colonne contient un pivot.
- Une variable libre est une variable dont la colonne ne contient pas de pivot.
Proposition Types de solutions à partir de la forme échelonnée
Lorsqu'un système est sous forme échelonnée, il y a trois possibilités pour son ensemble de solutions.
- Aucune solution (système incompatible)
Cela se produit s'il existe une ligne de la forme $$\begin{bmatrix} 0 & 0 & \dots & 0 & | & b \end{bmatrix}, \quad b \neq 0.$$ Cette ligne représente l'équation \(0=b\), ce qui est impossible. - Solution unique
Cela se produit si le système est compatible (pas de ligne de contradiction) et qu'il n'y a aucune variable libre. Chaque variable est alors une variable de pivot. - Infinité de solutions
Cela se produit si le système est compatible (pas de ligne de contradiction) et qu'il y a au moins une variable libre.
Exemple
- Aucune solution (système incompatible)
$$ \left[ \begin{array}{ccc|c} 1 & 2 & -1 & 4 \\ 0 & 1 & 3 & 5 \\ \mathbf{0} & \mathbf{0} & \mathbf{0} & \mathbf{2} \end{array} \right] \quad\Longrightarrow\quad \text{aucune solution, car cette ligne signifie } 0=2. $$ - Solution unique
$$ \left[ \begin{array}{ccc|c} \mathbf{1} & 2 & -1 & 4 \\ 0 & \mathbf{1} & 3 & 5 \\ 0 & 0 & \mathbf{4} & 8 \end{array} \right] \quad\Longrightarrow\quad \text{solution unique.} $$ À partir de la dernière ligne, \(4z=8 \implies z=2\). On utilise ensuite la substitution remontante pour trouver \(y\) puis \(x\). Géométriquement, les trois plans se coupent en un seul point. - Infinité de solutions
$$ \left[ \begin{array}{ccc|c} \mathbf{1} & 2 & -1 & 4 \\ 0 & \mathbf{1} & 3 & 5 \\ 0 & 0 & 0 & 0 \end{array} \right] \quad\Longrightarrow\quad \text{infinité de solutions.} $$ La dernière ligne correspond à \(0=0\), donc le système est compatible. Les variables \(x\) et \(y\) sont des variables de pivot, mais \(z\) est une variable libre. On peut poser \(z=t\) avec \(t \in \mathbb{R}\), puis utiliser la substitution remontante pour exprimer \(x\) et \(y\) en fonction de \(t\). Géométriquement, les plans se coupent le long d'une droite.