Équations de droites
Il existe de nombreuses applications des vecteurs en géométrie. Bien que certaines de ces applications puissent être traitées avec d'autres outils en géométrie plane (2D), les méthodes vectorielles deviennent particulièrement efficaces et puissantes dans l'espace tridimensionnel (3D), notamment pour étudier les relations entre les droites et les plans.
Équation vectorielle
La position de n'importe quel point sur une droite peut être décrite par un point de départ et une direction de déplacement. En termes vectoriels, cela signifie que le vecteur position de n'importe quel point de la droite peut être atteint en partant du vecteur position d'un point connu et en y ajoutant un multiple scalaire du vecteur directeur de la droite. Ce principe nous permet de définir une droite aussi bien en deux qu'en trois dimensions.
Définition Équation vectorielle d'une droite
L'équation vectorielle de la droite est :$$ \textcolor{olive}{\Vect{r}} = \textcolor{colordef}{\Vect{a}} + \textcolor{colorprop}{\lambda\Vect{b}}, \quad \lambda \in \R $$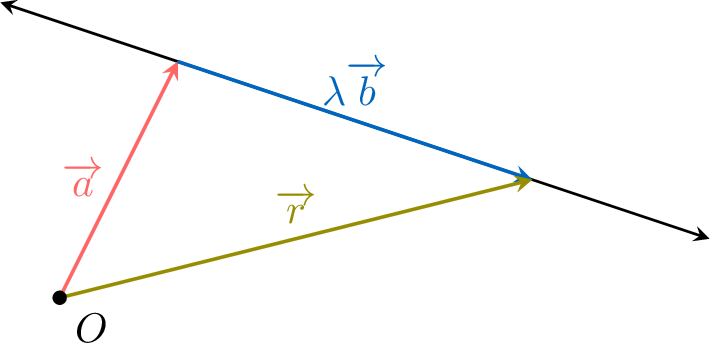
Exemple
Trouver l'équation vectorielle de la droite passant par le point \(A(2, -1)\) et de vecteur directeur \(\Vect{b} = \begin{pmatrix} 3 \\ 4 \end{pmatrix}\).
L'équation vectorielle est donnée par \(\Vect{r} = \Vect{a} + \lambda\Vect{b}\). En remplaçant par le point et la direction :$$ \Vect{r} = \begin{pmatrix} 2 \\
-1 \end{pmatrix} + \lambda \begin{pmatrix} 3 \\
4 \end{pmatrix}, \quad \lambda \in \R $$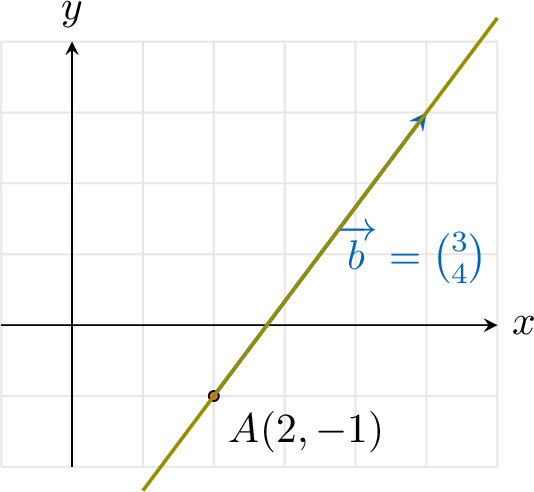
Équations paramétriques
Soit une droite passant par le point \(A(a_1, a_2, a_3)\) avec le vecteur directeur \(\Vect{b} = \begin{pmatrix} b_1 \\ b_2 \\ b_3 \end{pmatrix}\). Pour tout point \(R(x, y, z)\) sur la droite, l'équation vectorielle \(\begin{pmatrix} x \\ y \\ z \end{pmatrix} = \begin{pmatrix} a_1 \\ a_2 \\ a_3 \end{pmatrix} + \lambda \begin{pmatrix} b_1 \\ b_2 \\ b_3 \end{pmatrix}\) conduit aux équations paramétriques : $$ \begin{cases} x = a_1 + \lambda b_1 \\
y = a_2 + \lambda b_2 \\
z = a_3 + \lambda b_3 \end{cases}, \quad \lambda \in \mathbb{R} $$En 2 dimensions, les composantes z sont simplement omises.
Définition Équations paramétriques d'une droite
Les équations paramétriques d'une droite passant par un point \(A(a_1, a_2, a_3)\) et de vecteur directeur \(\Vect{b} = \begin{pmatrix} b_1 \\ b_2 \\ b_3 \end{pmatrix}\) sont données par le système :$$ \begin{cases} x = a_1 + \lambda b_1 \\
y = a_2 + \lambda b_2 \\
z = a_3 + \lambda b_3 \end{cases} $$où la variable \(\lambda \in \mathbb{R}\) est le paramètre.
Exemple
Déterminer les équations paramétriques de la droite passant par \(A(1, -2, 5)\) et \(B(3, 4, -1)\).
D'abord, calculer le vecteur directeur \(\Vect{AB} = \begin{pmatrix} 3-1 \\ 4-(-2) \\ -1-5 \end{pmatrix} = \begin{pmatrix} 2 \\ 6 \\ -6 \end{pmatrix}\).
En utilisant le point \(A\) et le vecteur directeur, les équations sont :$$ \begin{cases} x = 1 + 2\lambda \\ y = -2 + 6\lambda \\ z = 5 - 6\lambda \end{cases} $$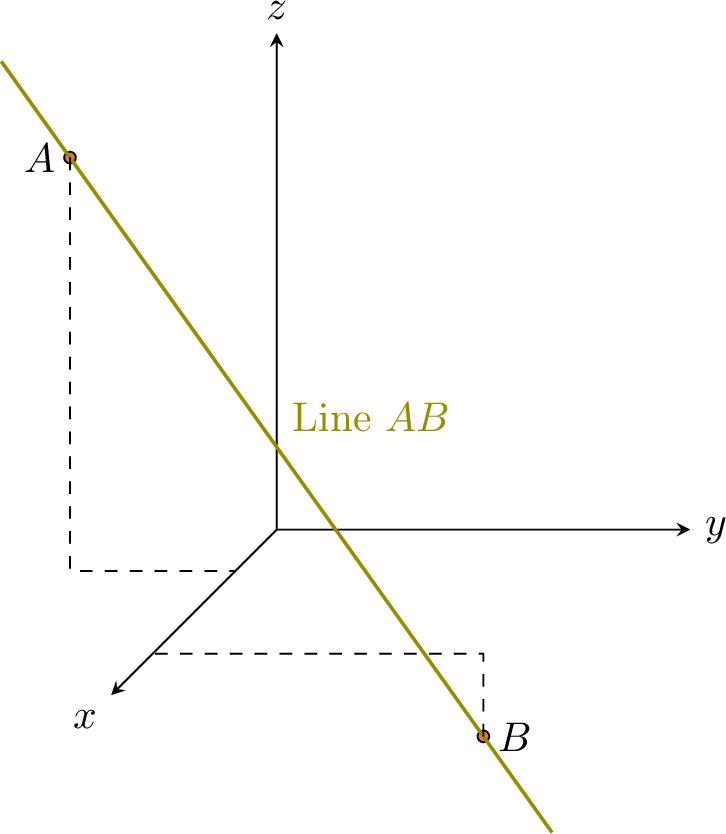
En utilisant le point \(A\) et le vecteur directeur, les équations sont :$$ \begin{cases} x = 1 + 2\lambda \\ y = -2 + 6\lambda \\ z = 5 - 6\lambda \end{cases} $$
Équation cartésienne dans le plan
En deux dimensions, une droite peut aussi être définie par un vecteur normal. En partant de l'équation vectorielle \(\Vect{r} = \Vect{a} + \lambda\Vect{b}\), on effectue le produit scalaire des deux membres par le vecteur normal \(\Vect{n}\) :$$ \begin{aligned} \Vect{r}\cdot \Vect{n} &= (\lambda\Vect{b}+\Vect{a} ) \cdot \Vect{n} \\
\Vect{r}\cdot \Vect{n} &= \lambda\Vect{b}\cdot \Vect{n}+\Vect{a} \cdot \Vect{n}&&\text{(distributivité)} \\
\Vect{r}\cdot \Vect{n} &= \Vect{a} \cdot \Vect{n}&&(\Vect{b} \cdot \Vect{n} = 0) \\
\end{aligned} $$Si l'on pose \(\Vect{r} = \begin{pmatrix} x \\ y \end{pmatrix}\) et le vecteur normal \(\Vect{n} = \begin{pmatrix} a \\ b \end{pmatrix}\), l'expression \(\Vect{r} \cdot \Vect{n}\) devient \(ax+by\). Le terme \(\Vect{a} \cdot \Vect{n}\) est une constante, que nous pouvons appeler \(C\). Ceci mène à la forme cartésienne familière.
Définition Équation cartésienne d'une droite en 2D
L'équation cartésienne d'une droite en 2D de vecteur normal \(\Vect{n} = \begin{pmatrix} a \\ b \end{pmatrix}\) est donnée par :$$ ax + by = C $$où \(C\) est une constante.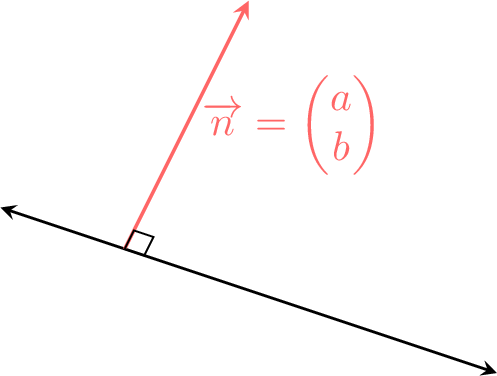
Exemple
Trouver l'équation cartésienne de la droite passant par le point \(P(1, 4)\) de vecteur normal \(\Vect{n} = \begin{pmatrix} 2 \\ -5 \end{pmatrix}\).
L'équation est de la forme \(2x - 5y = C\). En utilisant le point \(P(1,4)\) pour trouver \(C\) :$$ 2(1) - 5(4) = C \implies 2 - 20 = C \implies C = -18 $$L'équation cartésienne est \(2x - 5y = -18\).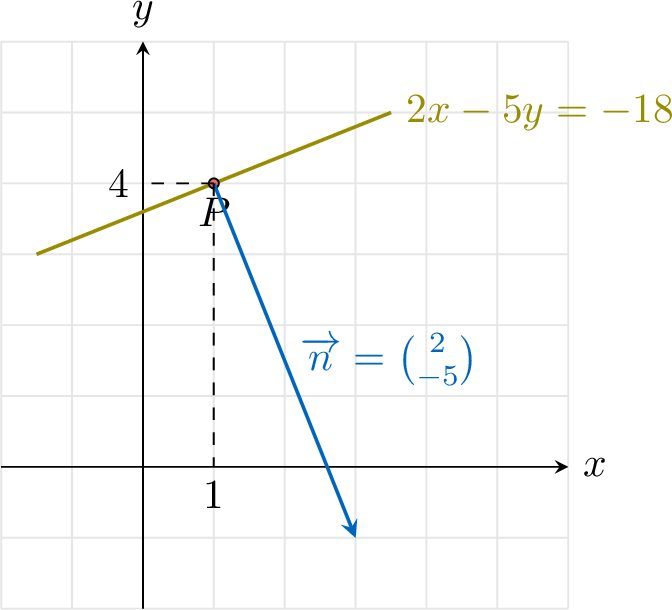
Plus courte distance d'un point à une droite
Lorsque l'on calcule la plus courte distance d'un point \(P\) à une droite, nous cherchons la distance perpendiculaire.
- En 2D, on peut trouver le pied de la perpendiculaire \(F\) sur la droite tel que \(\Vect{PF} \cdot \Vect{b} = 0\), où \(\Vect{b}\) est le vecteur directeur de la droite. La distance est alors la norme \(\lVert \Vect{PF} \rVert\).
- En 3D, les méthodes vectorielles impliquant le produit vectoriel sont les plus efficaces.
Méthode Plus courte distance d'un point à une droite en 2D
Pour trouver la plus courte distance d'un point \(P\) à une droite passant par \(A\) et de vecteur directeur \(\Vect{b}\) :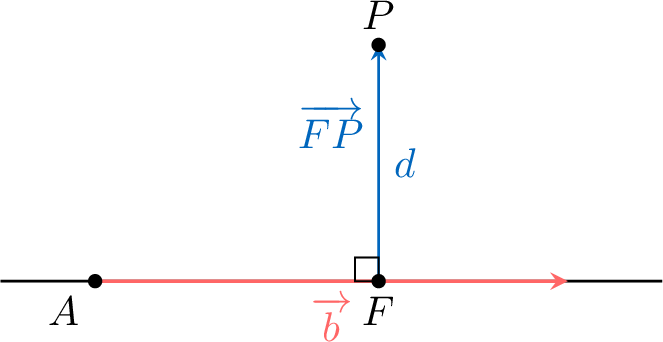
- Soit \(F\) un point générique de la droite : \(\Vect{f} = \Vect{a} + \lambda \Vect{b}\).
- Le vecteur \(\Vect{PF}\) est perpendiculaire à la droite, donc \(\Vect{PF} \cdot \Vect{b} = 0\).
- Résoudre pour \(\lambda\) afin de trouver les coordonnées de \(F\).
- La distance la plus courte est \(d = \lVert \Vect{PF} \rVert\).
Exemple
Trouver la distance la plus courte du point \(P(1, 4)\) à la droite \(\Vect{r} = \begin{pmatrix} 0 \\ -1 \end{pmatrix} + \lambda \begin{pmatrix} 1 \\ 1 \end{pmatrix}\).
Soit \(F\) le pied de la perpendiculaire sur la droite.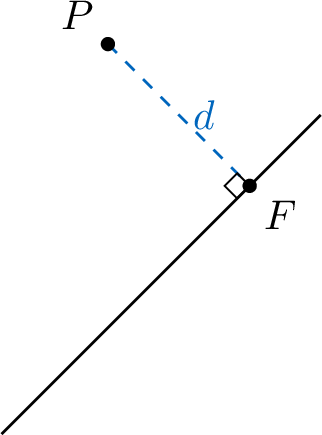
- Les coordonnées de \(F\) sont \((\lambda, -1+\lambda)\).
- Le vecteur \(\Vect{PF} = \begin{pmatrix} \lambda - 1 \\ (-1+\lambda) - 4 \end{pmatrix} = \begin{pmatrix} \lambda - 1 \\ \lambda - 5 \end{pmatrix}\).
- Comme \(\Vect{PF} \perp \Vect{b}\), le produit scalaire est nul : $$ \begin{pmatrix} \lambda - 1 \\ \lambda - 5 \end{pmatrix} \cdot \begin{pmatrix} 1 \\ 1 \end{pmatrix} = 0 $$ $$ (\lambda - 1)(1) + (\lambda - 5)(1) = 0 \implies 2\lambda - 6 = 0 \implies \lambda = 3 $$
- On remplace \(\lambda = 3\) dans \(\Vect{PF}\) : \(\Vect{PF} = \begin{pmatrix} 3-1 \\ 3-5 \end{pmatrix} = \begin{pmatrix} 2 \\ -2 \end{pmatrix}\).
- La distance est \(d = \sqrt{2^2 + (-2)^2} = \sqrt{8} = 2\sqrt{2}\).
Proposition Plus courte distance d'un point à une droite en 3D
La plus courte distance \(d\) d'un point \(P\) à une droite passant par le point \(A\) et de vecteur directeur \(\Vect{b}\) est donnée par :$$ d = \frac{\left\lVert \Vect{AP} \times \Vect{b} \right\rVert}{\left\lVert \Vect{b} \right\rVert} $$
Exemple
Trouver la distance du point \(P(3, 1, 1)\) à la droite passant par \(A(1, 2, 3)\) de vecteur directeur \(\Vect{b} = \begin{pmatrix} 1 \\ 0 \\ -1 \end{pmatrix}\).
- D'abord, trouver \(\Vect{AP} = \begin{pmatrix} 3-1 \\ 1-2 \\ 1-3 \end{pmatrix} = \begin{pmatrix} 2 \\ -1 \\ -2 \end{pmatrix}\).
- Calculer le produit vectoriel \(\Vect{AP} \times \Vect{b} = \begin{pmatrix} 2 \\ -1 \\ -2 \end{pmatrix} \times \begin{pmatrix} 1 \\ 0 \\ -1 \end{pmatrix} = \begin{pmatrix} (-1)\cdot (-1)-(-2)\cdot (0) \\ (-2)\cdot (1)-(2)\cdot (-1) \\ (2)\cdot (0)-(-1)\cdot (1) \end{pmatrix} = \begin{pmatrix} 1 \\ 0 \\ 1 \end{pmatrix}\).
- Calculer la norme \(\lVert \Vect{AP} \times \Vect{b} \rVert = \sqrt{1^2 + 0^2 + 1^2} = \sqrt{2}\).
- Calculer \(\lVert \Vect{b} \rVert = \sqrt{1^2 + 0^2 + (-1)^2} = \sqrt{2}\).
- La distance est \(d = \frac{\sqrt{2}}{\sqrt{2}} = 1\).