Équations différentielles
Bon nombre des lois les plus importantes de la nature, du mouvement des planètes à la croissance des populations, ne sont pas décrites par de simples formules mais par des équations qui relient une fonction à ses taux de variation. Celles-ci sont connues sous le nom d'équations différentielles. Elles constituent le langage de la science et de l'ingénierie modernes.
Dans ce chapitre, nous apprendrons ce que sont les équations différentielles et nous explorerons plusieurs techniques fondamentales pour trouver leurs solutions. Nous commencerons par des méthodes analytiques permettant d'obtenir des solutions exactes, telles que la séparation des variables et la méthode du facteur intégrant. Nous étudierons ensuite des méthodes numériques, comme la méthode d'Euler, qui nous permettent d'approximer des solutions lorsque les solutions exactes sont inaccessibles. Enfin, nous verrons comment ces équations sont appliquées pour modéliser des phénomènes du monde réel comme la croissance logistique et la loi du refroidissement de Newton.
Dans ce chapitre, nous apprendrons ce que sont les équations différentielles et nous explorerons plusieurs techniques fondamentales pour trouver leurs solutions. Nous commencerons par des méthodes analytiques permettant d'obtenir des solutions exactes, telles que la séparation des variables et la méthode du facteur intégrant. Nous étudierons ensuite des méthodes numériques, comme la méthode d'Euler, qui nous permettent d'approximer des solutions lorsque les solutions exactes sont inaccessibles. Enfin, nous verrons comment ces équations sont appliquées pour modéliser des phénomènes du monde réel comme la croissance logistique et la loi du refroidissement de Newton.
Principes fondamentaux des équations différentielles
Définition Équation différentielle
Une équation différentielle est une équation qui contient une fonction inconnue et une ou plusieurs de ses dérivées.
- L'ordre d'une équation différentielle est l'ordre de la plus haute dérivée qu'elle contient.
- Une solution générale est une famille de fonctions qui satisfait à l'équation, impliquant généralement une ou plusieurs constantes arbitraires.
- Une condition initiale est une valeur spécifiée de la fonction ou de ses dérivées en un point particulier.
- Une solution particulière est une solution spécifique correspondant à une condition initiale donnée. Elle peut être obtenue en utilisant une condition initiale pour déterminer les valeurs des constantes arbitraires dans la solution générale.
Exemple
Une pomme est lâchée sans vitesse initiale d'une hauteur de 10 mètres. Sa position verticale, \(y(t)\), est régie par l'équation différentielle du second ordre :$$\frac{d^2 y}{dt^2}=-g$$où \(g\) est la constante de l'accélération gravitationnelle.
- Énoncer les conditions initiales pour la position \(y(0)\) et la vitesse \(y'(0)\).
- Vérifier que la solution générale de cette équation est \(y(t) = -\frac{1}{2}gt^2 + At + B\).
- Utiliser les conditions initiales pour trouver la solution particulière décrivant le mouvement de la pomme.
- Conditions initiales :
- La hauteur initiale est de 10 mètres, donc \(y(0)=10\).
- La pomme est lâchée ``sans vitesse initiale'', donc sa vitesse initiale est nulle. Ainsi, \(y'(0)=0\).
- Vérification de la solution générale : Nous devons montrer que la dérivée seconde de \(y(t) = -\frac{1}{2}gt^2 + At + B\) est égale à \(-g\).
- Dérivée première (vitesse) : \(y'(t) = -gt + A\).
- Dérivée seconde (accélération) : \(y''(t) = -g\).
- Détermination de la solution particulière : Nous appliquons les conditions initiales à la solution générale et à sa dérivée première.
- En utilisant \(y(0)=10\) :$$ y(0) = -\frac{1}{2}g(0)^2 + A(0) + B \implies 10 = B $$
- En utilisant \(y'(0)=0\) :$$ y'(0) = -g(0) + A \implies 0 = A $$
Champs de pentes
Alors que les techniques algébriques nous donnent des formules pour les solutions, une approche géométrique peut nous donner une intuition puissante sur le comportement des solutions. Une équation différentielle de la forme \(\dfrac{dy}{dx} = f(x, y)\) est une machine qui nous donne la pente d'une courbe solution en n'importe quel point \((x,y)\) du plan.
Un champ de pentes (ou champ de directions) est une représentation graphique de cette information. À chaque point d'une grille, nous dessinons un petit segment de droite avec la pente donnée par l'équation différentielle. Le champ de pentes résultant agit comme un ensemble de ``courants'' dans une rivière. Toute solution particulière de l'équation différentielle est une courbe qui ``suit'' ces courants, toujours tangente aux marqueurs de pente qu'elle traverse.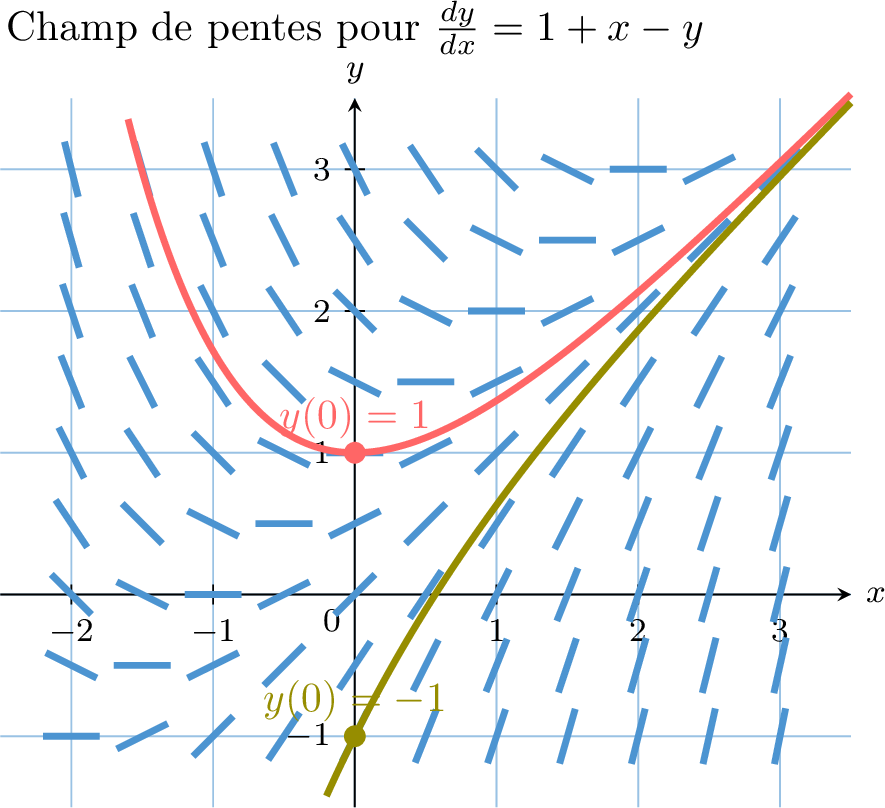
Un champ de pentes (ou champ de directions) est une représentation graphique de cette information. À chaque point d'une grille, nous dessinons un petit segment de droite avec la pente donnée par l'équation différentielle. Le champ de pentes résultant agit comme un ensemble de ``courants'' dans une rivière. Toute solution particulière de l'équation différentielle est une courbe qui ``suit'' ces courants, toujours tangente aux marqueurs de pente qu'elle traverse.
Méthode Esquisser un champ de pentes
Pour esquisser un champ de pentes pour \(\dfrac{dy}{dx} = f(x, y)\) :
- Choisir des points de la grille : Sélectionner un ensemble représentatif de points à coordonnées entières \((x, y)\).
- Calculer les pentes : Pour chaque point, calculer la valeur de la pente \(m = f(x, y)\). Organiser ces valeurs dans un tableau.
- Dessiner les segments : À chaque point de la grille, dessiner un court segment de droite avec la pente calculée.
Exemple
Pour l'équation différentielle \(\dfrac{dy}{dx} = x-y\) :
- Esquisser le champ de pentes pour les coordonnées entières où \(-1 \le x \le 2\) et \(-1 \le y \le 2\).
- Sur votre esquisse, dessiner la courbe de la solution particulière qui passe par le point \((0,1)\).
- Esquisse du champ : On calcule d'abord les pentes \(m=x-y\) pour chaque point à coordonnées entières de la grille.
\(\begin{aligned} & x\\ y \end{aligned} \) -1 0 1 2 2 -3 -2 -1 0 1 -2 -1 0 1 0 -1 0 1 2 -1 0 1 2 3 - Tracé de la courbe solution : En partant du point initial \((0,1)\), on suit la direction indiquée par le champ de pentes. La courbe doit être tangente aux segments de droite à mesure qu'elle traverse le champ.

Résolution par intégration directe
Méthode Résolution de \(\frac{dy}{dx} \equal f(x)\)
Lorsque la dérivée d'une fonction ne dépend que de \(x\), on peut trouver la solution générale en réarrangeant l'équation et en intégrant directement.$$\begin{aligned}\frac{dy}{dx} &= f(x)\\
dy &= f(x)\, dx \\
\int dy &= \int f(x) \, dx \\
y &= \int f(x) \, dx + C\end{aligned}$$
Exemple
Trouver la solution générale de \(\dfrac{dy}{dx} = 3x^2 \) et la solution particulière avec la condition initiale \(y(0)=4\).
On réarrange et on intègre les deux membres :$$\begin{aligned}\dfrac{dy}{dx} &= 3x^2 \\
dy &= 3x^2 \, dx \\
\int dy &= \int 3x^2\, dx \\
y & = x^3 + C\end{aligned}$$C'est la solution générale. Maintenant, on utilise \(y(0)=4\) :$$ 4 = (0)^3 + C \implies C=4 $$La solution particulière est \(y = x^3 + 4\).
Résolution par séparation des variables
Une équation différentielle à variables séparables est une équation qui peut être exprimée sous la forme \(\dfrac{dy}{dx} = g(x)h(y)\). Ces équations peuvent être résolues en séparant algébriquement les variables avant d'intégrer.
Méthode Résolution des équations séparables \(\frac{dy}{dx} \equal g(x)h(y)\)
Cette méthode s'applique lorsque l'équation peut être réarrangée de sorte que tous les termes en \(y\) soient d'un côté et tous les termes en \(x\) de l'autre.
- Séparer : Réarranger l'équation sous la forme \(\dfrac{1}{h(y)}\, dy = g(x)\, dx\).
- Intégrer : Intégrer les deux membres de l'équation par rapport à leurs variables respectives :$$ \int \dfrac{1}{h(y)} \, dy = \int g(x) \, dx $$
- Isoler \(y\) : Si possible, résoudre l'équation résultante pour \(y\) afin d'obtenir une solution explicite.
Exemple
Résoudre \(\dfrac{dy}{dx} = -2xy^2\) avec la condition initiale \(y(1)=1\).
On réarrange et on intègre les deux membres :$$\begin{aligned}\dfrac{dy}{dx} &= -2xy^2 \\
\frac{1}{y^2} \, dy &= -2x \, dx \\
\int \frac{1}{y^2} \, dy &= \int -2x \, dx \\
-\frac{1}{y} &= -x^2 + C\end{aligned}$$C'est la solution générale sous forme implicite. En utilisant la condition initiale \(y(1)=1\) :$$ -\dfrac{1}{1} = -(1)^2 + C \implies -1 = -1 + C \implies C = 0 $$En substituant \(C=0\), on obtient la solution particulière :$$ -\dfrac{1}{y} = -x^2 \implies y = \dfrac{1}{x^2} $$
Résolution d'équations homogènes
Une classe spéciale d'équations différentielles du premier ordre est constituée de celles qui peuvent être exprimées comme une fonction du rapport \(y/x\). Celles-ci sont appelées équations différentielles homogènes :$$ \dfrac{dy}{dx} = F\left(\frac{y}{x}\right). $$
Méthode Résolution des équations homogènes
Pour résoudre une équation différentielle homogène :
- Confirmer l'homogénéité : Réécrire l'équation pour montrer qu'elle est de la forme \(\dfrac{dy}{dx} = F(y/x)\).
- Substituer : Poser \(y=vx\). Remplacer toutes les occurrences de \(y/x\) par \(v\) et remplacer \(\dfrac{dy}{dx}\) par \(v + x\dfrac{dv}{dx}\).
- Résoudre l'équation séparable : L'équation résultante sera séparable en termes de \(v\) et \(x\). La résoudre pour \(v\).
- Substituer en retour : Remplacer \(v\) par \(y/x\) pour exprimer la solution finale en termes de \(x\) et \(y\).
Exemple
Trouver la solution générale de l'équation différentielle \(\dfrac{dy}{dx} = \dfrac{x+y}{x}\).
- Confirmer l'homogénéité : On réécrit le membre de droite :$$ \dfrac{dy}{dx} = \frac{x}{x} + \frac{y}{x} = 1 + \frac{y}{x}. $$C'est bien de la forme \(F(y/x)\), donc l'équation est homogène.
- Substituer : Posons \(y=vx\), donc \(\dfrac{dy}{dx} = v + x\dfrac{dv}{dx}\). L'équation devient :$$ v + x\dfrac{dv}{dx} = 1 + v. $$
- Résoudre l'équation séparable : On résout la nouvelle équation pour \(v\) :$$ x\dfrac{dv}{dx} = 1 \implies dv = \frac{1}{x} \, dx. $$On intègre les deux membres :$$ \int dv = \int \frac{1}{x} \, dx \implies v = \ln|x| + C. $$
- Substituer en retour : Remplacer \(v\) par \(y/x\) pour obtenir la solution finale :$$ \frac{y}{x} = \ln|x| + C. $$La solution générale explicite est :$$ y = x(\ln|x| + C). $$
Résolution avec le facteur intégrant
Les équations séparables ne sont pas le seul type d'équation différentielle du premier ordre. Considérons une équation sous la forme linéaire \(\dfrac{dy}{dx} + P(x)y = Q(x)\). Nous ne pouvons pas séparer les variables ici.
L'objectif est de transformer le membre de gauche, \(\dfrac{dy}{dx} + P(x)y\), en le résultat de la règle du produit, \(\dfrac{d}{dx}(I(x)y)\). Rappelons que la règle du produit donne :$$ \dfrac{d}{dx}(I(x)y) = I(x)\dfrac{dy}{dx} + I'(x)y. $$Essayons d'atteindre cet objectif en multipliant notre équation originale par une fonction (pour l'instant inconnue) \(I(x)\), que nous appelons le facteur intégrant :$$ I(x)\dfrac{dy}{dx} + I(x)P(x)y = I(x)Q(x). $$Maintenant, comparons le membre de gauche avec le développement de la règle du produit. Pour qu'ils soient égaux, nous avons besoin que :$$ I'(x) = I(x)P(x). $$Ceci est une équation différentielle séparable pour \(I(x)\) :$$ \dfrac{I'(x)}{I(x)} = P(x) \implies \ln|I| = \int P(x) \, dx. $$En résolvant pour \(I(x)\), on obtient la formule du facteur intégrant : \(I(x) = e^{\int P(x)\, dx}\). En multipliant notre équation originale par cette fonction spécifique, nous forçons le membre de gauche à devenir une simple dérivée, que nous pouvons ensuite intégrer facilement.
L'objectif est de transformer le membre de gauche, \(\dfrac{dy}{dx} + P(x)y\), en le résultat de la règle du produit, \(\dfrac{d}{dx}(I(x)y)\). Rappelons que la règle du produit donne :$$ \dfrac{d}{dx}(I(x)y) = I(x)\dfrac{dy}{dx} + I'(x)y. $$Essayons d'atteindre cet objectif en multipliant notre équation originale par une fonction (pour l'instant inconnue) \(I(x)\), que nous appelons le facteur intégrant :$$ I(x)\dfrac{dy}{dx} + I(x)P(x)y = I(x)Q(x). $$Maintenant, comparons le membre de gauche avec le développement de la règle du produit. Pour qu'ils soient égaux, nous avons besoin que :$$ I'(x) = I(x)P(x). $$Ceci est une équation différentielle séparable pour \(I(x)\) :$$ \dfrac{I'(x)}{I(x)} = P(x) \implies \ln|I| = \int P(x) \, dx. $$En résolvant pour \(I(x)\), on obtient la formule du facteur intégrant : \(I(x) = e^{\int P(x)\, dx}\). En multipliant notre équation originale par cette fonction spécifique, nous forçons le membre de gauche à devenir une simple dérivée, que nous pouvons ensuite intégrer facilement.
Méthode Méthode du facteur intégrant
Cette méthode résout les équations différentielles linéaires du premier ordre.
- Forme standard : S'assurer que l'équation est sous la forme \(\dfrac{dy}{dx} + P(x)y = Q(x)\).
- Trouver le facteur intégrant : Calculer \(I(x) = e^{\int P(x)\, dx}\) (aucune constante d'intégration n'est nécessaire ici).
- Multiplier : Multiplier toute l'équation par \(I(x)\). Le membre de gauche se simplifie en \(\dfrac{d}{dx}(I(x)y)\) :$$ \dfrac{d}{dx}(I(x)y) = I(x)Q(x). $$
- Intégrer et résoudre : Intégrer les deux membres par rapport à \(x\) et isoler \(y\) :$$ I(x)y = \int I(x)Q(x) \, dx. $$
Exemple
Résoudre \(\dfrac{dy}{dx} + 2y = 6\).
L'équation est sous forme standard avec \(P(x) = 2\) et \(Q(x) = 6\).
- Trouver le facteur intégrant :$$ I(x) = e^{\int 2 \, dx} = e^{2x}. $$
- Multiplier par le facteur intégrant :$$ e^{2x}\dfrac{dy}{dx} + 2e^{2x}y = 6e^{2x} \implies \dfrac{d}{dx}(e^{2x}y) = 6e^{2x}. $$
- Intégrer et résoudre :$$ e^{2x}y = \int 6e^{2x} \, dx = 3e^{2x} + C, $$d'où$$ y = 3 + Ce^{-2x}. $$
Détermination de solutions en série d'équations différentielles
Il est possible de générer les termes d'une série de Maclaurin pour la solution d'une équation différentielle directement à partir de l'équation elle-même, sans avoir à trouver d'abord la solution.
Méthode Déterminer une série de Maclaurin à partir d'une équation différentielle
Étant donné \(\dfrac{dy}{dx} = f(x,y)\) et une condition initiale \(y(0)=y_0\) :
- Dérivation itérative : Trouver les expressions des dérivées d'ordre supérieur en dérivant de manière répétée l'équation de l'étape précédente par rapport à \(x\). Cela nécessite souvent une dérivation implicite.$$\begin{aligned}y' &= f(x,y)\\ y'' &= \frac{d}{dx}f(x,y)\\ y''' &= \frac{d}{dx}\left(\frac{d}{dx}f(x,y)\right)\\ &\vdots\end{aligned}$$
- Substitution itérative : Utiliser la condition initiale \((0,y_0)\) et les valeurs des dérivées précédemment trouvées pour calculer les valeurs numériques de \(y'(0), y''(0), y'''(0), \dots\) en séquence.
- Construire la série : Substituer ces valeurs dans la formule de la série de Maclaurin :$$ y(x) = y(0) + y'(0)x + \dfrac{y''(0)}{2!}x^2 + \dfrac{y'''(0)}{3!}x^3 + \dots $$
Exemple
Étant donné \(\dfrac{dy}{dx} = x - 2y\) et \(y(0) = 1\), déterminer la série de Maclaurin pour \(y(x)\) jusqu'au terme en \(x^3\).
On nous donne \(y(0)=1\).
- Dérivation itérative :$$\begin{aligned}y' &= x - 2y\\ y'' &= \frac{d}{dx}(x - 2y) = 1 - 2y'\\ y''' &= \frac{d}{dx}(1 - 2y') = -2y''\end{aligned}$$
- Substitution itérative :$$\begin{aligned}y'(0) &= 0 - 2y(0) = -2(1) = -2,\\ y''(0) &= 1 - 2y'(0) = 1 - 2(-2) = 5,\\ y'''(0) &= -2y''(0) = -2(5) = -10.\end{aligned}$$
- Construire la série :$$\begin{aligned}y(x) &= y(0) + y'(0)x + \dfrac{y''(0)}{2!}x^2 + \dfrac{y'''(0)}{3!}x^3 + \dots \\ &= 1 - 2x + \dfrac{5}{2}x^2 - \dfrac{5}{3}x^3 + \dots\end{aligned}$$
Approximation de solutions par la méthode d'Euler
Lorsqu'une équation différentielle ne peut pas être résolue analytiquement, on peut approximer sa solution à l'aide de méthodes numériques. La méthode d'Euler est la plus simple, utilisant l'approximation linéaire pour avancer le long de la courbe solution.
La méthode commence par une condition initiale \((x_0, y_0)\) et procède par étapes. Définissons un petit pas constant \(h\). La coordonnée \(x\) de chaque point suivant est trouvée en ajoutant ce pas : \(x_{n+1} = x_n + h\).
Le cœur de la méthode consiste à approximer la dérivée \(\dfrac{dy}{dx}\) en utilisant la pente du segment de droite reliant deux points consécutifs, \((x_n, y_n)\) et \((x_{n+1}, y_{n+1})\) :$$ \dfrac{dy}{dx} \text{ en } (x_n, y_n) \approx \dfrac{y_{n+1} - y_n}{x_{n+1} - x_n} = \dfrac{y_{n+1} - y_n}{h}. $$Puisque l'équation différentielle nous donne la valeur exacte de la dérivée, \(\dfrac{dy}{dx} = f(x_n, y_n)\), nous pouvons les égaler :$$ \dfrac{y_{n+1} - y_n}{h}\approx f(x_n, y_n). $$En réarrangeant cette formule pour trouver la valeur suivante de \(y\), \(y_{n+1}\), on obtient l'étape itérative :$$ y_{n+1} \approx y_n + h \cdot f(x_n, y_n). $$La collection de segments de droite créée par cette procédure itérative forme une approximation polygonale de la courbe solution réelle.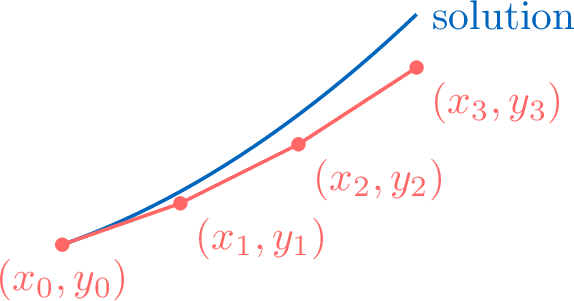
La méthode commence par une condition initiale \((x_0, y_0)\) et procède par étapes. Définissons un petit pas constant \(h\). La coordonnée \(x\) de chaque point suivant est trouvée en ajoutant ce pas : \(x_{n+1} = x_n + h\).
Le cœur de la méthode consiste à approximer la dérivée \(\dfrac{dy}{dx}\) en utilisant la pente du segment de droite reliant deux points consécutifs, \((x_n, y_n)\) et \((x_{n+1}, y_{n+1})\) :$$ \dfrac{dy}{dx} \text{ en } (x_n, y_n) \approx \dfrac{y_{n+1} - y_n}{x_{n+1} - x_n} = \dfrac{y_{n+1} - y_n}{h}. $$Puisque l'équation différentielle nous donne la valeur exacte de la dérivée, \(\dfrac{dy}{dx} = f(x_n, y_n)\), nous pouvons les égaler :$$ \dfrac{y_{n+1} - y_n}{h}\approx f(x_n, y_n). $$En réarrangeant cette formule pour trouver la valeur suivante de \(y\), \(y_{n+1}\), on obtient l'étape itérative :$$ y_{n+1} \approx y_n + h \cdot f(x_n, y_n). $$La collection de segments de droite créée par cette procédure itérative forme une approximation polygonale de la courbe solution réelle.
Méthode Méthode d'Euler
Pour approximer la solution de \(\dfrac{dy}{dx} = f(x,y)\) avec la condition initiale \((x_0, y_0)\) et un pas \(h\), les coordonnées du point suivant \((x_{n+1}, y_{n+1})\) sont trouvées à partir du point précédent \((x_n, y_n)\) en utilisant les formules itératives :$$\begin{cases}x_{n+1} = x_n + h, \\
y_{n+1} = y_n + h \cdot f(x_n, y_n).\end{cases}$$
Proposition Précision et erreur
La méthode d'Euler est une approximation. La précision de cette approximation dépend de deux facteurs principaux :
- La taille du pas (\(h\)) : Un pas \(h\) plus petit conduit généralement à une meilleure approximation. Quand \(h \to 0\), le chemin polygonal de l'approximation se rapproche de la courbe solution réelle. Cependant, cela nécessite plus d'étapes de calcul.
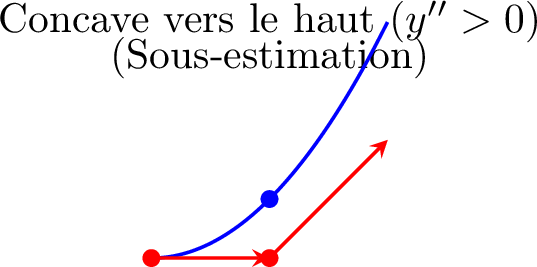
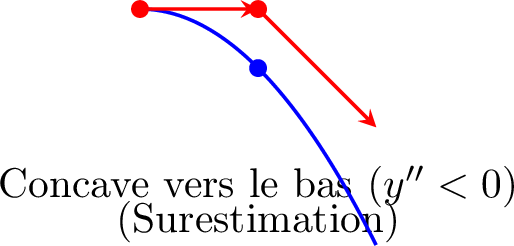
- La concavité de la courbe solution : La nature de la concavité de la courbe détermine si l'approximation est une surestimation ou une sous-estimation.
- Si la courbe est concave vers le haut (\(\frac{d^2y}{dx^2} > 0\)), la tangente au début de chaque étape se situe en dessous de la courbe, ce qui signifie que la méthode d'Euler produira une sous-estimation.
- Si la courbe est concave vers le bas (\(\frac{d^2y}{dx^2} < 0\)), la tangente se situe au-dessus de la courbe, ce qui se traduit par une surestimation.
- Si la courbe est concave vers le haut (\(\frac{d^2y}{dx^2} > 0\)), la tangente au début de chaque étape se situe en dessous de la courbe, ce qui signifie que la méthode d'Euler produira une sous-estimation.
Exemple
On considère l'équation différentielle \(\dfrac{dy}{dx} = -2xy\) avec la condition initiale \(y(0)=1\).
- Utiliser la méthode d'Euler avec un pas de \(h=0,1\) pour trouver une valeur approchée de \(y(0,2)\).
- En résolvant l'équation différentielle, montrer que la solution particulière est \(y(x) = e^{-x^2}\).
- Calculer le pourcentage d'erreur de votre approximation de la partie (a).
- En considérant le signe de \(\dfrac{d^2y}{dx^2}\) dans l'intervalle \(0 \le x \le 0,2\), expliquer si votre approximation de la partie (a) est une surestimation ou une sous-estimation de la valeur réelle.
- On part de \((x_0, y_0)=(0,1)\) avec \(h=0,1\) et \(f(x,y)=-2xy\).
- Étape 1 : \(y_1 = y_0 + h \cdot (-2x_0y_0) = 1 + 0,1(-2\cdot 0 \cdot 1) = 1\). Donc, \(y(0,1) \approx 1\).
- Étape 2 : \(y_2 = y_1 + h \cdot (-2x_1y_1) = 1 + 0,1(-2\cdot 0,1 \cdot 1) = 1 - 0,02 = 0,98\).
- On résout par séparation des variables :$$ \frac{dy}{dx} = -2xy \implies \int \frac{1}{y} \, dy = \int -2x \, dx, $$d'où$$ \ln|y| = -x^2 + C. $$Avec la condition initiale \(y(0)=1\) :$$ \ln|1| = -0^2 + C \implies C=0. $$La solution particulière est donc \(y(x) = e^{-x^2}\).
- La valeur exacte est \(y_{\text{exact}} = e^{-(0,2)^2} = e^{-0,04} \approx 0,960789\ldots\) La valeur approchée est \(y_{\text{approx}} = 0,98\). On obtient$$ \text{Erreur} = \left|\frac{0,960789\ldots - 0,98}{0,960789\ldots}\right| \times 100\pourcent \approx 2,00\pourcent. $$
- Pour déterminer la nature de l'erreur, on vérifie la concavité avec la dérivée seconde :$$\begin{aligned}\frac{d^2y}{dx^2} &= \frac{d}{dx}(-2xy) \\ &= -2\left(y + x\,\frac{dy}{dx}\right) \\ &= -2\bigl(y + x(-2xy)\bigr) \\ &= -2y(1-2x^2).\end{aligned}$$Au début de l'approximation, pour \(x\) dans \([0;0,2]\), \((1-2x^2)\) est positif. Comme \(y\) est aussi positif dans cette région, le signe de la dérivée seconde est négatif. Puisque la dérivée seconde est négative, la courbe solution est concave vers le bas. La méthode d'Euler utilise la tangente pour approximer la courbe. Pour une fonction concave vers le bas, la tangente se situe au-dessus de la courbe. Par conséquent, chaque étape de l'approximation aboutira à un point plus haut que la courbe réelle, ce qui en fait une surestimation.