Produit Scalaire
Le produit scalaire est une opération fondamentale en algèbre vectorielle. Il est utilisé dans divers domaines comme la physique (par exemple pour calculer un travail ou des projections) et en mathématiques (pour déterminer les angles entre vecteurs et l'orthogonalité).
Définition
Le concept de produit scalaire offre un moyen de multiplier deux vecteurs pour obtenir un scalaire (un nombre réel). Cette opération peut être envisagée sous deux aspects fondamentaux : l'un géométrique, impliquant l'angle entre les vecteurs, et l'autre analytique, utilisant leurs coordonnées. Un résultat clé de l'algèbre vectorielle, dérivé du théorème d'Al-Kashi (loi des cosinus), est que ces deux perspectives sont entièrement cohérentes.
Explorons cela en considérant deux vecteurs, \(\Vect{u}=\begin{pmatrix} x \\y\\ \end{pmatrix}\) et \(\Vect{v}=\begin{pmatrix} x' \\y'\\ \end{pmatrix}\), avec un angle \(\theta\) entre eux.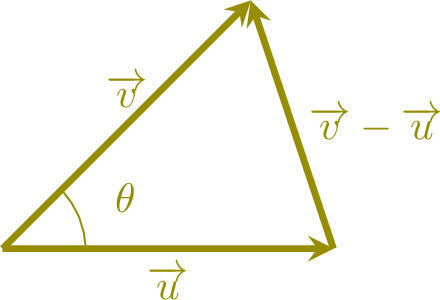
Explorons cela en considérant deux vecteurs, \(\Vect{u}=\begin{pmatrix} x \\y\\ \end{pmatrix}\) et \(\Vect{v}=\begin{pmatrix} x' \\y'\\ \end{pmatrix}\), avec un angle \(\theta\) entre eux.
- \(\|\Vect{u}\|^2=x^2 +y^2\)
- \(\|\Vect{v}\|^2=x'^2 +y'^2\)
- \(\|\Vect{v}-\Vect{u}\|^2=\left(x'-x\right)^2+\left(y'-y\right)^2\) puisque \(\Vect{v}-\Vect{u}=\begin{pmatrix} x'-x \\y'-y\\ \end{pmatrix}\).
Définition Produit Scalaire Géométrique
Le produit scalaire de deux vecteurs \(\Vect{u}\) et \(\Vect{v}\) est défini par :$$\Vect{u} \cdot \Vect{v} = \|\Vect{u}\| \|\Vect{v}\| \cos \theta$$où \(\theta\) est l'angle entre les vecteurs.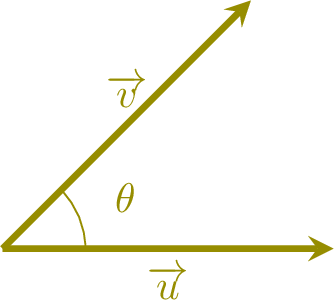
\(\Vect{u} \cdot \Vect{v}\) se lit « \(\Vect{u}\) scalaire \(\Vect{v}\) ».
Le produit scalaire est un nombre réel (un scalaire), et non un vecteur. Il est :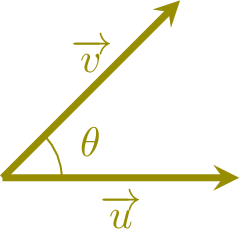 \(\quad\)
\(\quad\)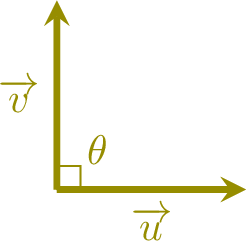 \(\quad\)
\(\quad\)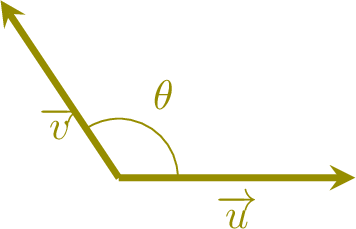
Le produit scalaire est un nombre réel (un scalaire), et non un vecteur. Il est :
- positif si \(0< \theta < \frac{\pi}{2}\) (angle aigu) ;
- nul si \(\theta = \frac{\pi}{2}\) (vecteurs orthogonaux), ou si au moins un des vecteurs est le vecteur nul ;
- négatif si \(\frac{\pi}{2}<\theta \leq \pi\) (angle obtus).
\(\quad\)\(\quad\)
Définition Produit Scalaire avec la Notation des Points
Le produit scalaire de \(\Vect{AB}\) par \(\Vect{AC}\) est défini par :$$\Vect{AB} \cdot \Vect{AC} = AB \times AC \times \cos(\AngleFr{BAC}),$$où \(AB\) et \(AC\) désignent les longueurs des segments \(\SegmentFr{AB}\) et \(\SegmentFr{AC}\).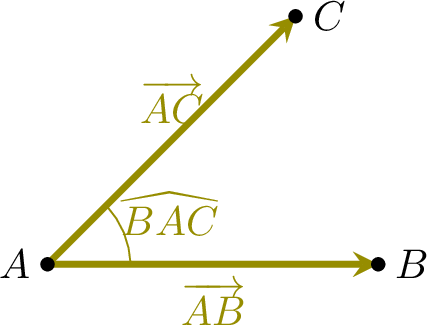
Exemple
Pour \(AB = 2\), \(AC = 5\) et \(\AngleFr{BAC} = \frac{\pi}{4}\), calculer \(\Vect{AB} \cdot \Vect{AC}\).
$$\begin{aligned}\Vect{AB} \cdot \Vect{AC} &= AB \times AC \times \cos(\AngleFr{BAC}) \\
&= 2 \times 5 \times \cos\left( \frac{\pi}{4} \right)\\
&= 10 \times \frac{\sqrt{2}}{2}\\
&= 5 \sqrt{2}\\
\end{aligned}$$
Définition Produit Scalaire Analytique
Pour deux vecteurs \(\Vect{u} = \begin{pmatrix} x \\ y \end{pmatrix}\) et \(\Vect{v} = \begin{pmatrix} x' \\ y' \end{pmatrix}\), le produit scalaire est défini par :$$\Vect{u} \cdot \Vect{v} = xx' + yy'.$$
Propriétés
Proposition Carré scalaire d'un vecteur
$$\Vect{u} \cdot \Vect{u} = \|\Vect{u}\|^2$$
Soit \(\Vect{u} = \begin{pmatrix} x \\ y \end{pmatrix}\). En utilisant la définition analytique :$$\begin{aligned}[t] \Vect{u} \cdot \Vect{u} &= x \cdot x + y \cdot y \\
& =x^2 + y^2\\
&= ( \sqrt{x^2+y^2} )^2\\
&= \|\Vect{u}\|^2\end{aligned}$$
Proposition Symétrie
Le produit scalaire est commutatif :$$\Vect{u} \cdot \Vect{v} = \Vect{v} \cdot \Vect{u}.$$
Soient \(\Vect{u} = \begin{pmatrix} x \\ y \end{pmatrix}\) et \(\Vect{v} = \begin{pmatrix} x' \\ y' \end{pmatrix}\). En utilisant la définition analytique et la commutativité du produit réel :$$\begin{aligned}[t] \Vect{u} \cdot \Vect{v} &= xx' + yy' \\
& = x'x + y'y\\
&=\Vect{v} \cdot \Vect{u}.\\
\end{aligned}$$
Proposition Bilinéarité
Le produit scalaire est linéaire par rapport à chacun de ses arguments vectoriels.
- \(\Vect{u} \cdot (\Vect{v} + \Vect{w}) = \Vect{u} \cdot \Vect{v} + \Vect{u} \cdot \Vect{w}\) (distributivité par rapport au second argument) ;
- \((\Vect{u} + \Vect{v}) \cdot \Vect{w} = \Vect{u} \cdot \Vect{w} + \Vect{v} \cdot \Vect{w}\) (distributivité par rapport au premier argument) ;
- \(\Vect{u} \cdot (k\Vect{v}) = k(\Vect{u} \cdot \Vect{v})\) et \((k\Vect{u})\cdot\Vect{v} = k(\Vect{u}\cdot\Vect{v})\), où \(k\) est un nombre réel.
Proposition Identités remarquables
- \(\|\Vect{u} + \Vect{v}\|^2 = \|\Vect{u}\|^2 + 2\Vect{u} \cdot \Vect{v} + \|\Vect{v}\|^2\).
- \(\|\Vect{u} - \Vect{v}\|^2 = \|\Vect{u}\|^2 - 2\Vect{u} \cdot \Vect{v} + \|\Vect{v}\|^2\).
- \((\Vect{u} + \Vect{v}) \cdot (\Vect{u} - \Vect{v}) = \|\Vect{u}\|^2 - \|\Vect{v}\|^2\).
- $$\begin{aligned}[t]\|\Vect{u} + \Vect{v}\|^2 &= (\Vect{u} + \Vect{v}) \cdot (\Vect{u} + \Vect{v})\\ &= \Vect{u}\cdot\Vect{u} + \Vect{u}\cdot\Vect{v} + \Vect{v}\cdot\Vect{u} + \Vect{v}\cdot\Vect{v} && \text{(distributivité)} \\ &= \|\Vect{u}\|^2 + 2(\Vect{u} \cdot \Vect{v}) + \|\Vect{v}\|^2 && \text{(symétrie et \(\Vect{u}\cdot\Vect{u}=\|\Vect{u}\|^2\))}\end{aligned}$$
- $$\begin{aligned}\|\Vect{u} - \Vect{v}\|^2 &= (\Vect{u} - \Vect{v}) \cdot (\Vect{u} - \Vect{v})\\ &= \Vect{u}\cdot\Vect{u} - \Vect{u}\cdot\Vect{v} - \Vect{v}\cdot\Vect{u} + \Vect{v}\cdot\Vect{v} \\ &= \|\Vect{u}\|^2 - 2(\Vect{u} \cdot \Vect{v}) + \|\Vect{v}\|^2\end{aligned}$$
- $$\begin{aligned}(\Vect{u} + \Vect{v}) \cdot (\Vect{u} - \Vect{v}) &= \Vect{u}\cdot\Vect{u} - \Vect{u}\cdot\Vect{v} + \Vect{v}\cdot\Vect{u} - \Vect{v}\cdot\Vect{v} \\ &= \|\Vect{u}\|^2 - \Vect{u}\cdot\Vect{v} + \Vect{u}\cdot\Vect{v} - \|\Vect{v}\|^2 && \text{(symétrie)} \\ &= \|\Vect{u}\|^2 - \|\Vect{v}\|^2\end{aligned}$$
Proposition Identité de polarisation
$$\Vect{u} \cdot \Vect{v}=\frac{1}{2}\left( \|\Vect{u} + \Vect{v}\|^2 - \|\Vect{u}\|^2 - \|\Vect{v}\|^2 \right).$$
Cette identité est déduite directement des identités remarquables. En partant du développement de \(\|\Vect{u} + \Vect{v}\|^2\) :$$ \|\Vect{u} + \Vect{v}\|^2 = \|\Vect{u}\|^2 + 2(\Vect{u} \cdot \Vect{v}) + \|\Vect{v}\|^2.$$Nous pouvons réarranger l'équation pour isoler \(\Vect{u} \cdot \Vect{v}\) :$$ 2(\Vect{u} \cdot \Vect{v}) = \|\Vect{u} + \Vect{v}\|^2 - \|\Vect{u}\|^2 - \|\Vect{v}\|^2.$$En divisant par 2, on obtient l'identité :$$ \Vect{u} \cdot \Vect{v} = \frac{1}{2} \left( \|\Vect{u} + \Vect{v}\|^2 - \|\Vect{u}\|^2 - \|\Vect{v}\|^2 \right). $$De manière équivalente, en utilisant \(\|\Vect{u} - \Vect{v}\|^2\), on obtient aussi$$ \Vect{u} \cdot \Vect{v} = \frac{1}{2} \left( \|\Vect{u}\|^2 + \|\Vect{v}\|^2 - \|\Vect{u} - \Vect{v}\|^2 \right). $$
Interprétations géométriques
Proposition Condition de colinéarité
Soient \(\Vect{u}\) et \(\Vect{v}\) deux vecteurs non nuls.
- Si \(\Vect{u}\) et \(\Vect{v}\) sont colinéaires et de même sens, alors \(\Vect{u} \cdot \Vect{v} = \|\Vect{u}\|\|\Vect{v}\|\).
- Si \(\Vect{u}\) et \(\Vect{v}\) sont colinéaires et de sens opposés, alors \(\Vect{u} \cdot \Vect{v} = -\|\Vect{u}\|\|\Vect{v}\|\).
Ceci découle directement de la définition géométrique \(\Vect{u} \cdot \Vect{v} = \|\Vect{u}\|\|\Vect{v}\|\cos\theta\).
- Si les vecteurs sont colinéaires et de même sens, l'angle \(\theta\) entre eux est \(0\). Comme \(\cos(0) = 1\), le résultat est \(\Vect{u} \cdot \Vect{v} = \|\Vect{u}\|\|\Vect{v}\|\).
- S'ils sont colinéaires et de sens opposés, l'angle \(\theta\) est \(\pi\). Comme \(\cos(\pi) = -1\), le résultat est \(\Vect{u} \cdot \Vect{v} = -\|\Vect{u}\|\|\Vect{v}\|\).
Définition Vecteurs orthogonaux
Deux vecteurs \(\Vect{u}\) et \(\Vect{v}\) sont dits orthogonaux si leur produit scalaire est nul :$$\Vect{u} \perp \Vect{v} \iff \Vect{u} \cdot \Vect{v} = 0.$$
Proposition Droites perpendiculaires
Deux droites \((AB)\) et \((CD)\) sont perpendiculaires si et seulement si le produit scalaire de leurs vecteurs directeurs est nul :$$(AB) \perp (CD) \iff \Vect{AB} \cdot \Vect{CD} = 0.$$
Proposition Projection orthogonale
Soient \(A\), \(B\) et \(C\) trois points. Soit \(H\) le projeté orthogonal du point \(C\) sur la droite \(\Line{AB}\). Alors :$$\Vect{AB} \cdot \Vect{AC} = \Vect{AB} \cdot \Vect{AH}.$$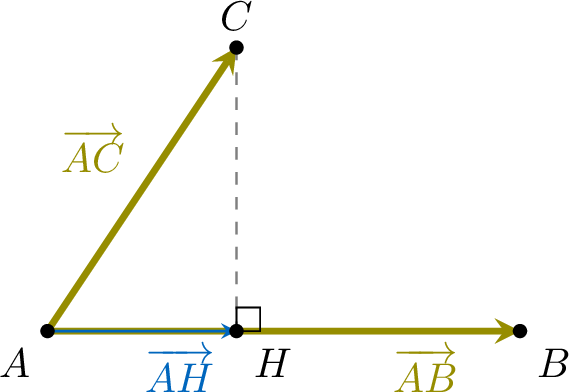
- Si \(\Vect{AB}\) et \(\Vect{AH}\) sont de même sens, \(\Vect{AB} \cdot \Vect{AC} = AB \times AH\).
- Si \(\Vect{AB}\) et \(\Vect{AH}\) sont de sens opposés, \(\Vect{AB} \cdot \Vect{AC} = -AB \times AH\).
En utilisant la relation de Chasles, on peut écrire \(\Vect{AC} = \Vect{AH} + \Vect{HC}\) :$$\begin{aligned}\Vect{AB} \cdot \Vect{AC} &= \Vect{AB} \cdot (\Vect{AH} + \Vect{HC}) \\
&= \Vect{AB} \cdot \Vect{AH} + \Vect{AB} \cdot \Vect{HC}.\end{aligned}$$Puisque \(H\) est le projeté orthogonal de \(C\) sur \((AB)\), les vecteurs \(\Vect{AB}\) et \(\Vect{HC}\) sont orthogonaux. Par conséquent, leur produit scalaire est nul : \(\Vect{AB} \cdot \Vect{HC} = 0\). Il nous reste donc$$\Vect{AB} \cdot \Vect{AC} = \Vect{AB} \cdot \Vect{AH}.$$La deuxième partie de la proposition découle de la condition de colinéarité appliquée à \(\Vect{AB}\) et \(\Vect{AH}\).
Théorème de la médiane et applications
Proposition Théorème de la médiane
Étant donné deux points \(A\) et \(B\) et leur milieu \(I\) (c'est-à-dire \(I\) milieu de \(\SegmentFr{AB}\)), pour tout point \(M\) du plan, on a :$$\Vect{MA} \cdot \Vect{MB}=MI^2-\frac{1}{4} AB^2.$$
En utilisant la relation de Chasles, on introduit le point milieu \(I\) :$$\begin{aligned}\Vect{MA} \cdot \Vect{MB} &= (\Vect{MI}+\Vect{IA}) \cdot (\Vect{MI}+\Vect{IB})\\
&= (\Vect{MI}+\Vect{IA}) \cdot (\Vect{MI}-\Vect{IA}) && \text{(car \(I\) est le milieu, \(\Vect{IB}=-\Vect{IA}\))}\\
&= MI^2-IA^2 && \text{(identité remarquable)}\\
&= MI^2-\left(\frac{1}{2}AB\right)^2 && \text{(car \(IA = \frac{1}{2}AB\))} \\
&= MI^2-\frac{1}{4} AB^2\end{aligned}$$
Proposition Cercle défini par l'orthogonalité
L'ensemble de tous les points \(M\) du plan tels que \(\Vect{MA} \cdot \Vect{MB} = 0\) est le cercle de diamètre \(\SegmentFr{AB}\).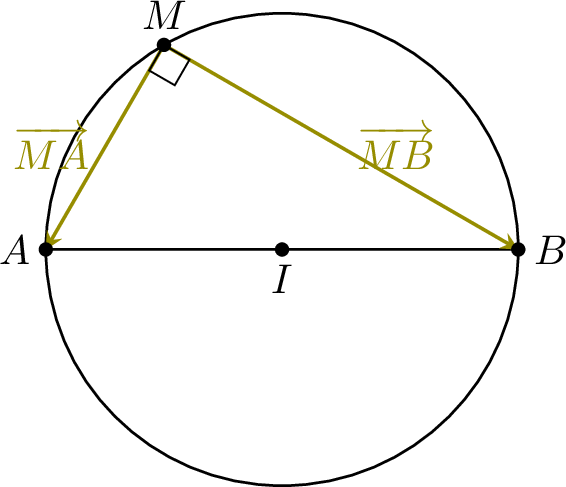
On applique le théorème de la médiane, qui énonce \(\Vect{MA} \cdot \Vect{MB} = MI^2 - \frac{1}{4}AB^2\). La condition pour l'orthogonalité est \(\Vect{MA} \cdot \Vect{MB} = 0\). En substituant, on obtient :$$\begin{aligned}MI^2 - \frac{1}{4}AB^2 &= 0 \\
MI^2 &= \frac{1}{4}AB^2 \\
MI &= \sqrt{\frac{1}{4}AB^2} \\
MI &= \frac{1}{2}AB.\end{aligned}$$Ce résultat signifie que la distance de tout point \(M\) au point milieu \(I\) est constante et égale à la moitié de la longueur du segment \(\SegmentFr{AB}\). C'est la définition du cercle de centre \(I\) et de diamètre \(\SegmentFr{AB}\).