Géométrie vectorielle des droites et des plans
Géométrie vectorielle des droites
Définition Vecteurs colinéaires
Deux vecteurs \(\Vect{u}\) et \(\Vect{v}\) sont colinéaires si l'un est un multiple scalaire de l'autre (même direction). C'est-à-dire s'il existe un nombre réel \(k\) tel que :$$\Vect{u} = k \Vect{v}.$$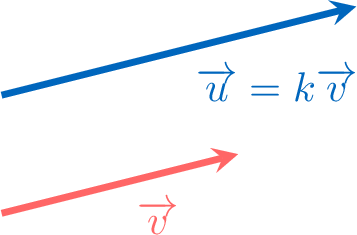
Proposition Alignement
Trois points \(A, B\) et \(C\) sont alignés si et seulement si les vecteurs \(\Vect{AB}\) et \(\Vect{AC}\) sont colinéaires.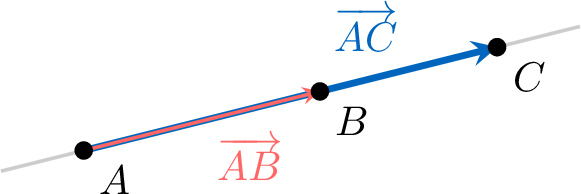
Définition Caractérisation d'une droite
Une droite \(d\) est définie par un point \(A\) et un vecteur directeur \(\Vect{u}\) (\(\Vect{u} \neq \Vect{0}\)). On la note \(d(A, \Vect{u})\).
Un point \(M\) appartient à \(d\) s'il existe un réel \(k\) tel que \(\Vect{AM} = k\Vect{u}\).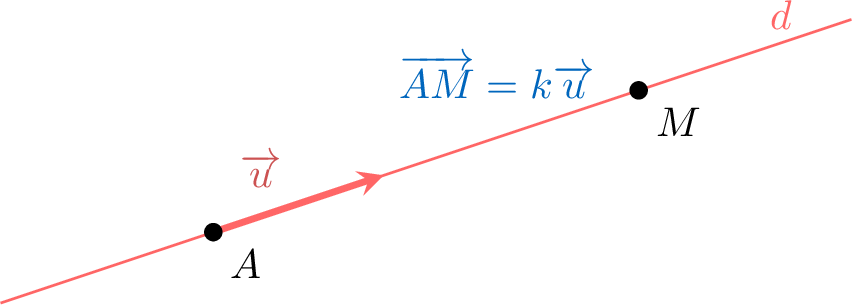
Un point \(M\) appartient à \(d\) s'il existe un réel \(k\) tel que \(\Vect{AM} = k\Vect{u}\).
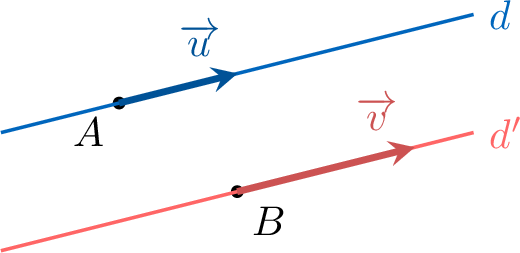
Proposition Position relative de deux droites
Soient \(d(A, \Vect{u})\) et \(d'(B, \Vect{v})\) deux droites de l'espace.
- Si \(\Vect{u}\) et \(\Vect{v}\) sont colinéaires, les droites sont parallèles (soit strictement parallèles, soit confondues).
- Si \(\Vect{u}\) et \(\Vect{v}\) ne sont pas colinéaires :
- Elles sont sécantes si elles ont un point commun (elles sont alors coplanaires).
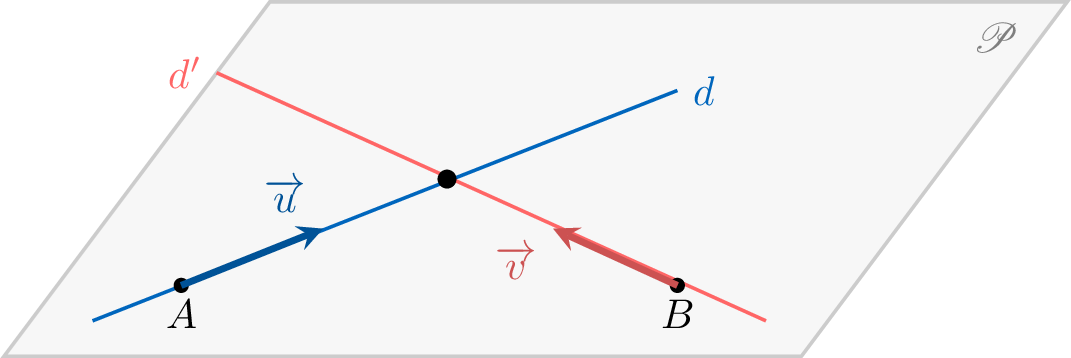
- Elles sont non coplanaires si elles n'ont aucun point commun.
- Elles sont sécantes si elles ont un point commun (elles sont alors coplanaires).
Géométrie vectorielle des plans
Définition Vecteurs coplanaires
Trois vecteurs \(\Vect{u}, \Vect{v}\) et \(\Vect{w}\) sont coplanaires si l'un est une combinaison linéaire des deux autres. C'est-à-dire, s'il existe deux réels \(x\) et \(y\) tels que :$$\Vect{w} = x \Vect{u} + y \Vect{v}.$$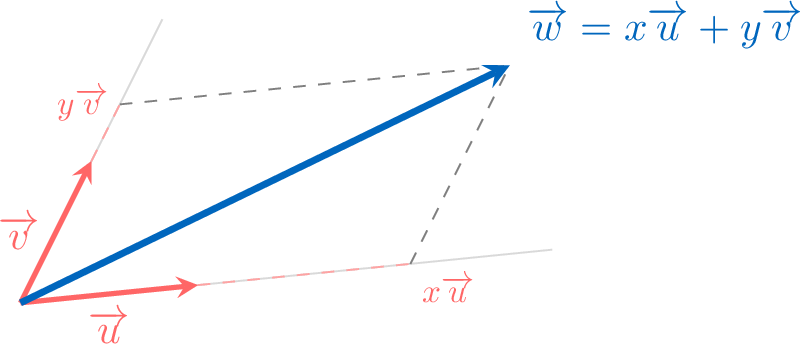
Proposition Coplanarité de quatre points
Quatre points \(A, B, C\) et \(D\) appartiennent à un même plan si et seulement si les vecteurs \(\Vect{AB}, \Vect{AC}\) et \(\Vect{AD}\) sont coplanaires.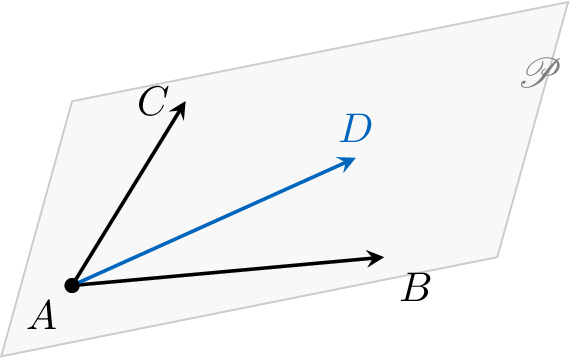
Définition Caractérisation d'un plan
Un plan \(\mathscr{P}\) est défini par un point \(A\) et deux vecteurs directeurs non colinéaires \(\Vect{u}\) et \(\Vect{v}\). On le note \(\mathscr{P}(A, \Vect{u}, \Vect{v})\). Un point \(M\) appartient à \(\mathscr{P}\) s'il existe des réels \(x\) et \(y\) tels que \(\Vect{AM} = x\Vect{u} + y\Vect{v}\).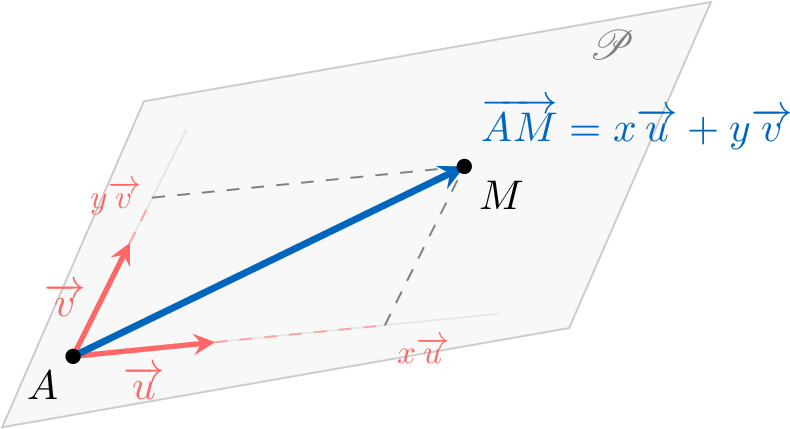
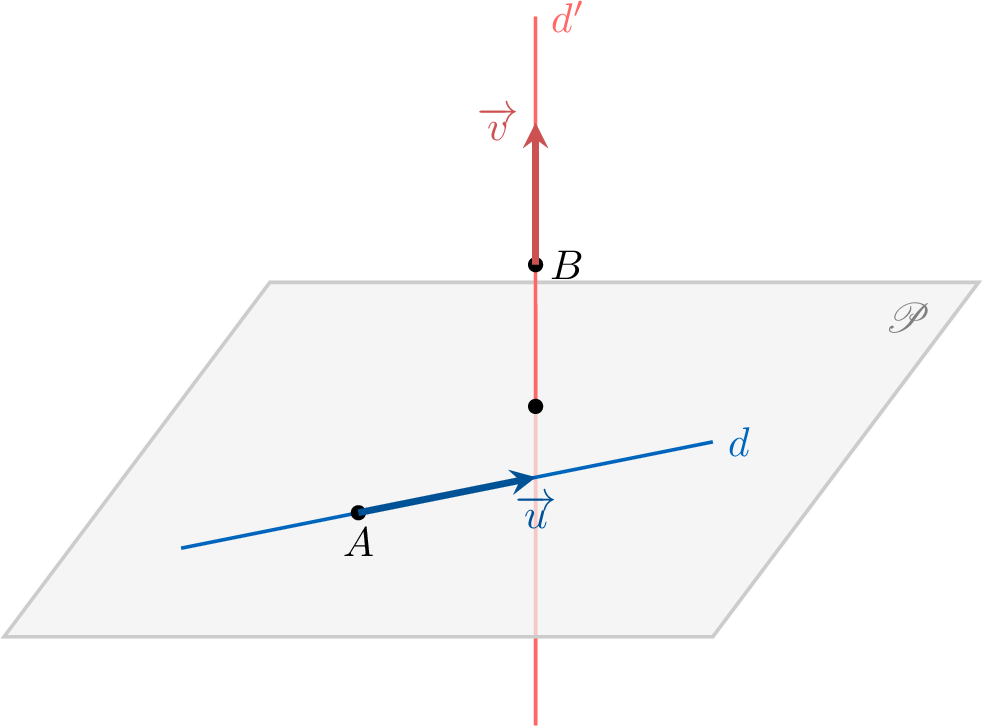
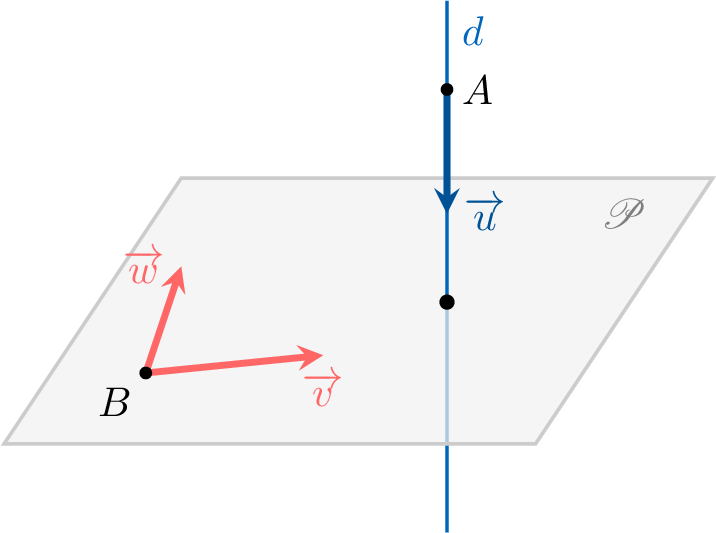
Proposition Position relative d'une droite et d'un plan
Soit \(d(A,\Vect{u})\) une droite et \(\mathscr{P}(B,\Vect{v},\Vect{w})\) un plan.
- La droite \((d)\) est parallèle au plan \(\mathscr{P}\) si les vecteurs \(\Vect{u}\), \(\Vect{v}\) et \(\Vect{w}\) sont coplanaires.
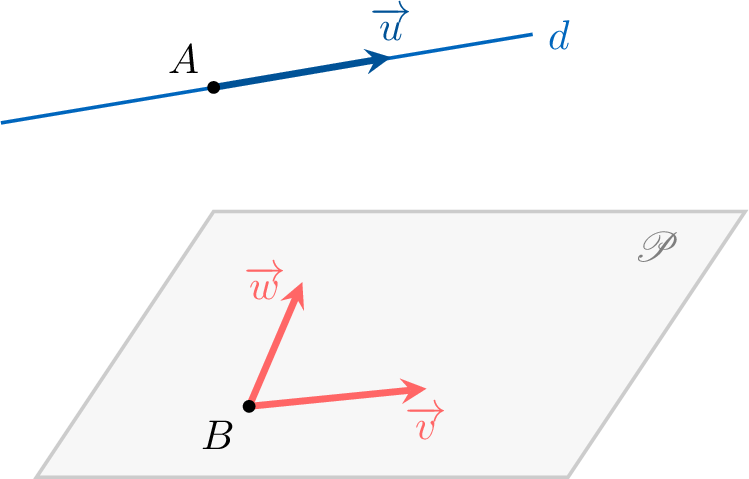
- Sinon, la droite et le plan sont sécants en un unique point.
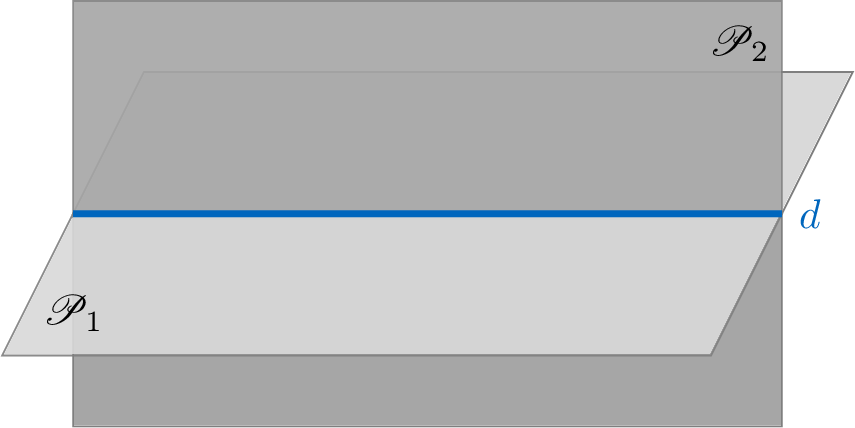
Proposition Position relative de deux plans
- Deux plans sont parallèles si et seulement si les vecteurs directeurs de l'un sont des combinaisons linéaires des vecteurs directeurs de l'autre.
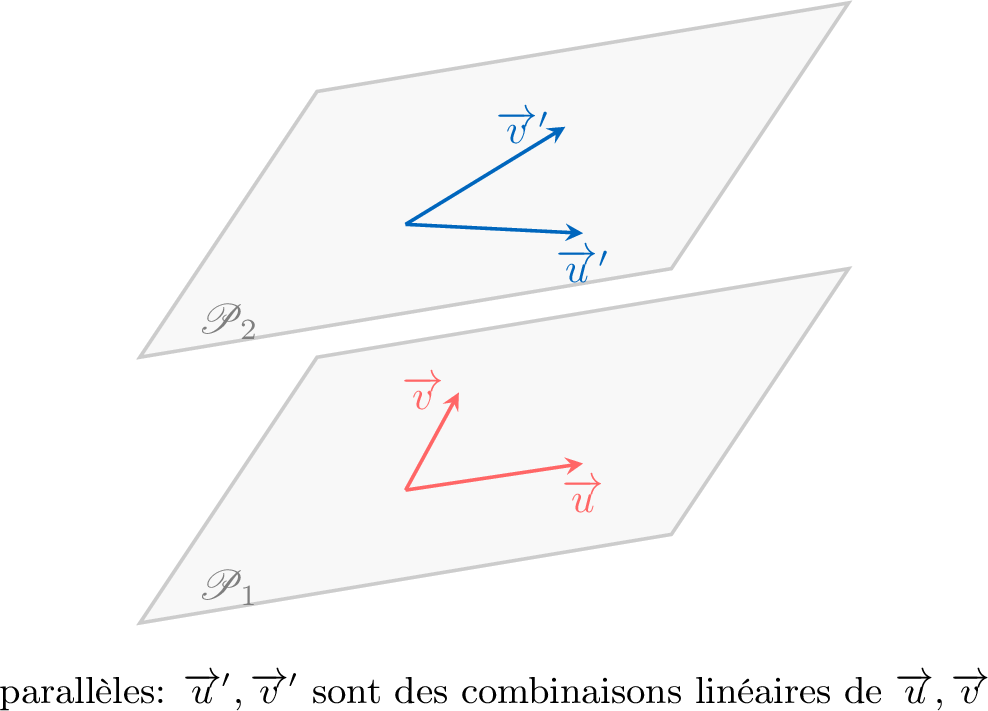
- Sinon, ils sont sécants et leur intersection est toujours une droite.
Vecteurs normaux à un plan
Définition Vecteur normal
Étant donné un plan \(\mathscr{P}\) défini par un point \(A\) et deux vecteurs directeurs \(\Vect{u}\) et \(\Vect{v}\), un vecteur non nul \(\Vect{n}\) est dit normal au plan s’il est orthogonal à la fois à \(\Vect{u}\) et à \(\Vect{v}\).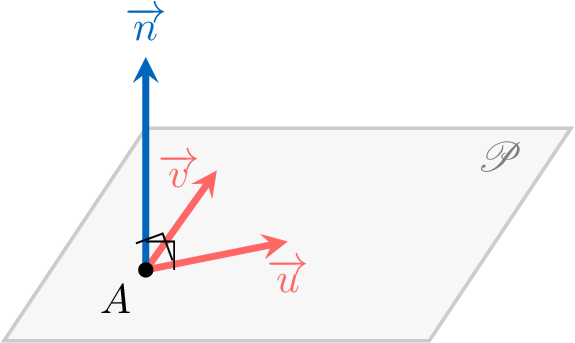
Proposition Plans perpendiculaires
Deux plans \(\mathscr{P}_1\) et \(\mathscr{P}_2\) sont perpendiculaires si et seulement si leurs vecteurs normaux respectifs \(\Vect{n_1}\) et \(\Vect{n_2}\) sont orthogonaux.$$\mathscr{P}_1 \perp \mathscr{P}_2 \iff \Vect{n_1} \cdot \Vect{n_2} = 0$$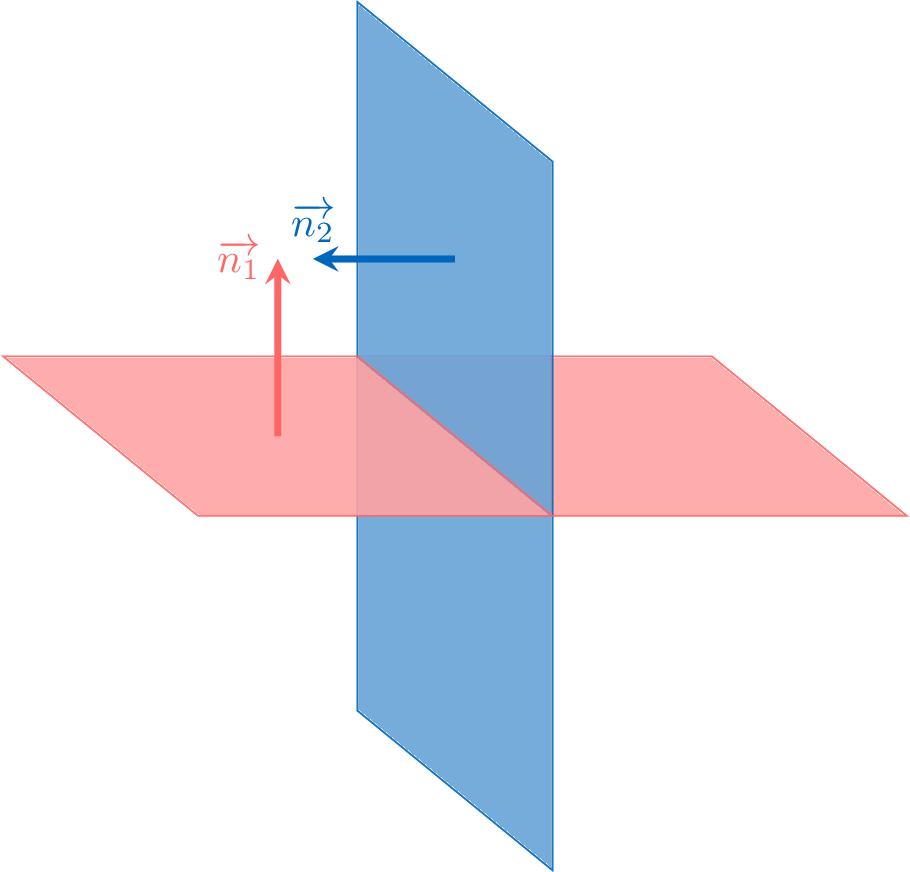
Exemple
Dans un cube \(ABCDEFGH\), on considère les plans \(\mathscr{P}(A,\Vect{AB},\Vect{AC})\) et \(\mathscr{P}(A,\Vect{AD},\Vect{AE})\).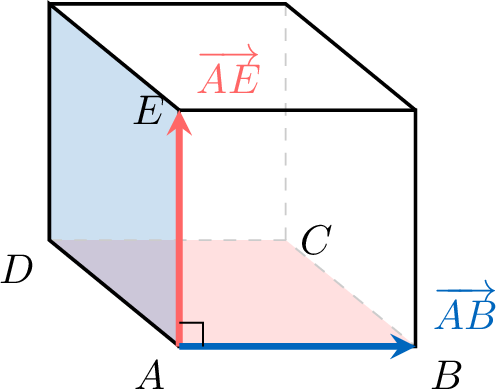
- Un vecteur normal au plan \(\mathscr{P}(A,\Vect{AB},\Vect{AC})\) est \(\Vect{AE}\) (car il est perpendiculaire à \(\Vect{AB}\) et à \(\Vect{AC}\)).
- Un vecteur normal au plan \(\mathscr{P}(A,\Vect{AD},\Vect{AE})\) est \(\Vect{AB}\) (car il est perpendiculaire aux arêtes \(\Vect{AD}\) et \(\Vect{AE}\)).
- Or, puisque \(ABCDEFGH\) est un cube, on a \(\Vect{AE}\cdot \Vect{AB}=0\).
Équation cartésienne d'un plan
Proposition Équation cartésienne
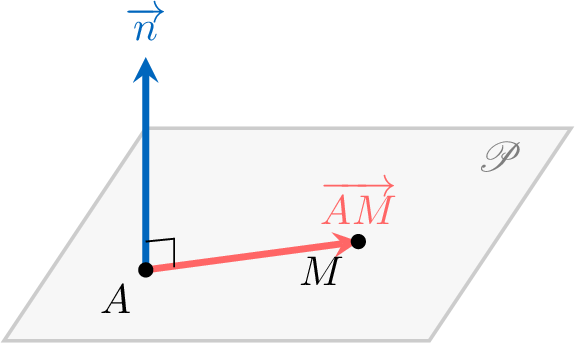
Dans un repère orthonormé, le plan passant par le point \(A(x_A, y_A, z_A)\) et dont un vecteur normal est \(\Vect{n} = \begin{pmatrix} a \\ b \\ c \end{pmatrix}\) admet une équation cartésienne de la forme :$$ax + by + cz + d = 0$$où \((a, b, c) \neq (0, 0, 0)\) et \(d\) est un nombre réel.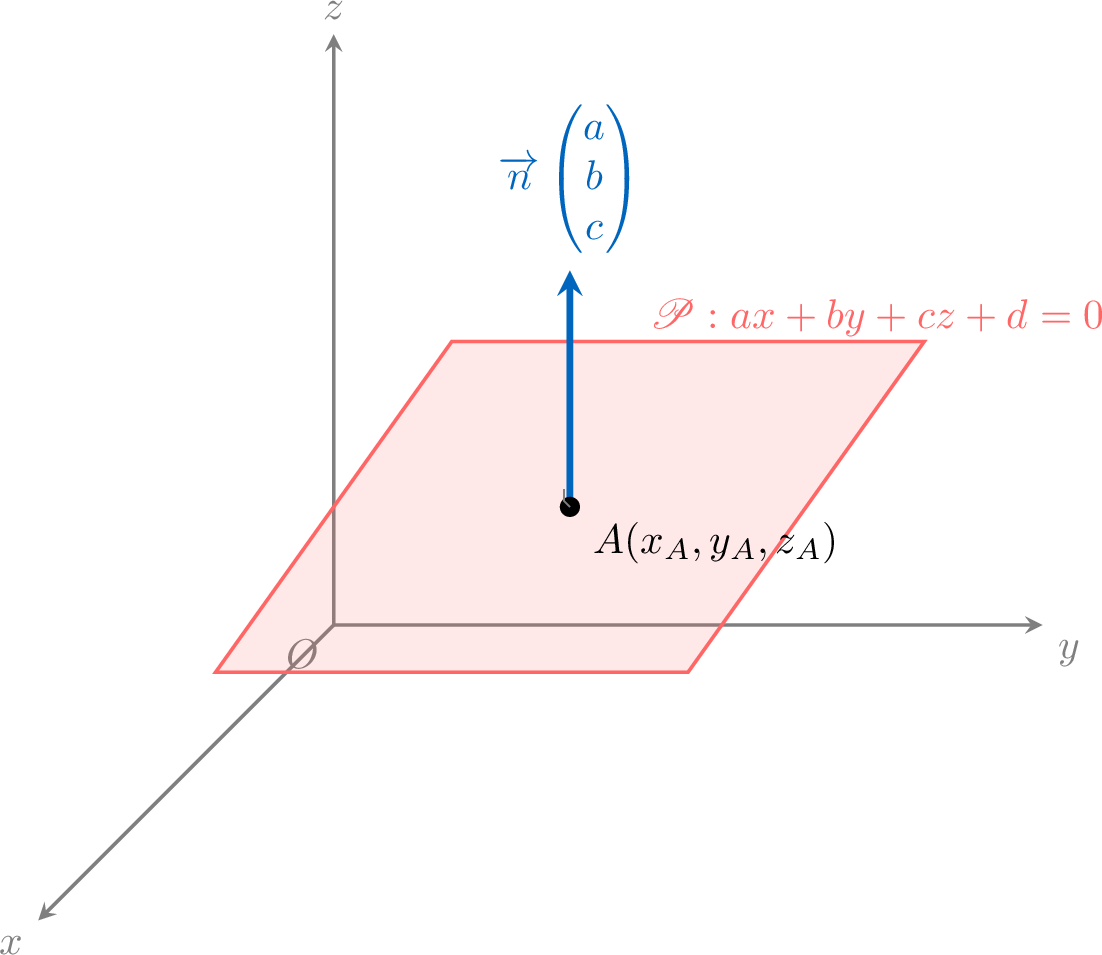
Un point \(M(x,y,z)\) appartient au plan si et seulement si \(\Vect{AM}\cdot \Vect{n}=0\).$$\begin{aligned}\Vect{AM}\cdot \Vect{n}=0&\iff a(x-x_A)+b(y-y_A)+c(z-z_A)=0\\
&\iff ax+by+cz-(ax_A+by_A+cz_A)=0.\end{aligned}$$En posant \(d=-(ax_A+by_A+cz_A)\), on obtient l’équation cartésienne sous la forme \(ax+by+cz+d=0\).
Exemple
Déterminer l’équation cartésienne du plan passant par \(A(-1,2,3)\) et de vecteur normal \(\Vect{n}=\begin{pmatrix}2\\-3\\1\end{pmatrix}\).
- Méthode 1 : L’équation s’écrit \(2x-3y+z+d=0\). Comme \(A\in\mathscr{P}\) : $$\begin{aligned} 2(-1) - 3(2) + 3 + d &= 0\\ -2 - 6 + 3 + d &= 0\\ d &= 5\end{aligned}$$Donc l’équation du plan est : \(2x-3y+z+5=0\).
- Méthode 2 :$$\begin{aligned}\Vect{AM} \cdot \Vect{n} = 0 &\iff 2(x - (-1)) - 3(y - 2) + 1(z - 3) = 0\\ &\iff 2x - 3y + z + 5 = 0\end{aligned}$$
Distance d'un point à un plan
Définition Projeté orthogonal
Le projeté orthogonal d’un point \(M\) sur un plan \(\mathscr{P}\) est le point \(H\) défini comme l’intersection du plan et de la droite passant par \(M\) et perpendiculaire à \(\mathscr{P}\).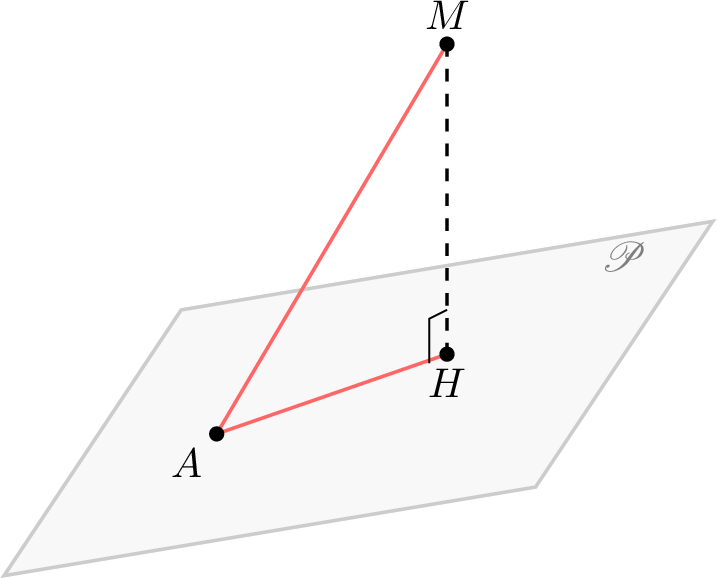
Définition Distance d'un point à un ensemble
La distance entre un point \(M\) et un ensemble de points \(\mathcal{S}\) est la plus petite longueur \(MA\) parmi tous les points \(A\) appartenant à \(\mathcal{S}\).
Proposition Plus courte distance
La distance d’un point \(M\) à un plan \(\mathscr{P}\) est la longueur \(MH\), où \(H\) est le projeté orthogonal de \(M\) sur \(\mathscr{P}\).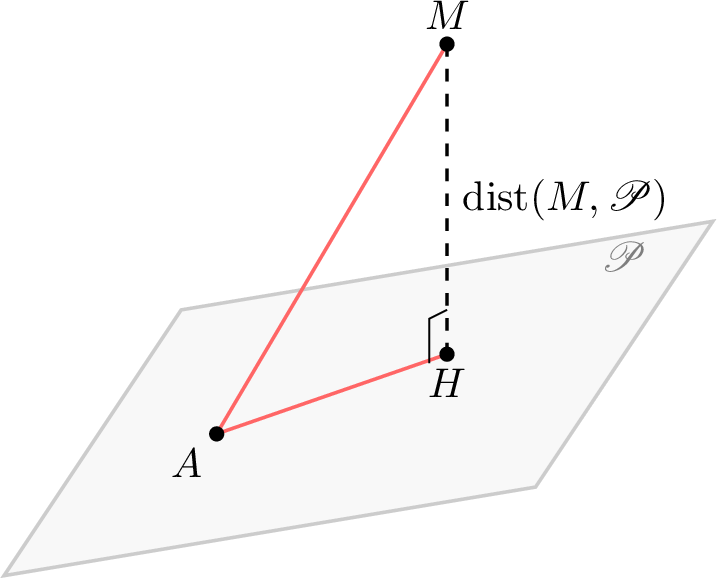
Soit \(H\) le projeté orthogonal du point \(M\) sur le plan \(\mathscr{P}\), et soit \(A\) un point quelconque appartenant au plan. On peut décomposer le vecteur \(\Vect{MA}\) à l’aide de la relation de Chasles :$$\Vect{MA}=\Vect{MH}+\Vect{HA}.$$En calculant le carré de la norme (carré scalaire), on obtient :$$\begin{aligned}\|\Vect{MA}\|^2&=(\Vect{MH}+\Vect{HA})\cdot(\Vect{MH}+\Vect{HA})\\
&=\|\Vect{MH}\|^2+2(\Vect{MH}\cdot\Vect{HA})+\|\Vect{HA}\|^2.\end{aligned}$$Or, la droite \((MH)\) est perpendiculaire au plan \(\mathscr{P}\) et le vecteur \(\Vect{HA}\) appartient au plan ; les vecteurs \(\Vect{MH}\) et \(\Vect{HA}\) sont donc orthogonaux. Leur produit scalaire est donc nul : \(\Vect{MH}\cdot\Vect{HA}=0\). L’expression se simplifie alors en :$$\|\Vect{MA}\|^2=\|\Vect{MH}\|^2+\|\Vect{HA}\|^2.$$Comme \(\|\Vect{HA}\|^2\ge 0\), on en déduit \(\|\Vect{MA}\|^2\ge \|\Vect{MH}\|^2\), donc \(MA\ge MH\).
Cela confirme que \(MH\) est la distance minimale entre \(M\) et tout point du plan.
Cela confirme que \(MH\) est la distance minimale entre \(M\) et tout point du plan.