Applications des vecteurs en physique
Les vecteurs sont fondamentaux en physique car ils permettent de décrire des grandeurs qui ont à la fois une norme et une direction, telles que la force, la vitesse et l'accélération. Ce chapitre explore comment les opérations vectorielles, y compris le produit scalaire et le produit vectoriel, sont utilisées pour modéliser et résoudre des problèmes en mécanique et en électromagnétisme. Nous commencerons par les principes des forces et de l'équilibre, puis nous aborderons la description du mouvement en deux et trois dimensions.
Deuxième loi de Newton
Les lois du mouvement de Sir Isaac Newton constituent le fondement de la mécanique classique. Sa deuxième loi stipule que la force nette \(\sum \Vect{F}\) agissant sur un objet de masse \(m\) est égale au produit de sa masse par son accélération \(\Vect{a}\) :$$ \sum \Vect{F} = m\Vect{a} $$
Exemple
La force magnétique \(\Vect{F}\) exercée sur une particule de charge électrique \(q\) se déplaçant à une vitesse \(\Vect{v}\) dans un champ magnétique \(\Vect{B}\) est donnée par la formule de la force de Lorentz :$$ \Vect{F} = q(\Vect{v} \times \Vect{B}) $$Une particule de charge \(q = 1,6 \times 10^{-19}\) C entre dans un champ magnétique uniforme \(\Vect{B} = \begin{pmatrix} 0 \\ 0,5 \\ 0 \end{pmatrix}\) T avec une vitesse \(\Vect{v} = \begin{pmatrix} 2 \times 10^5 \\ 0 \\ 0 \end{pmatrix}\) m/s, comme illustré ci-dessous.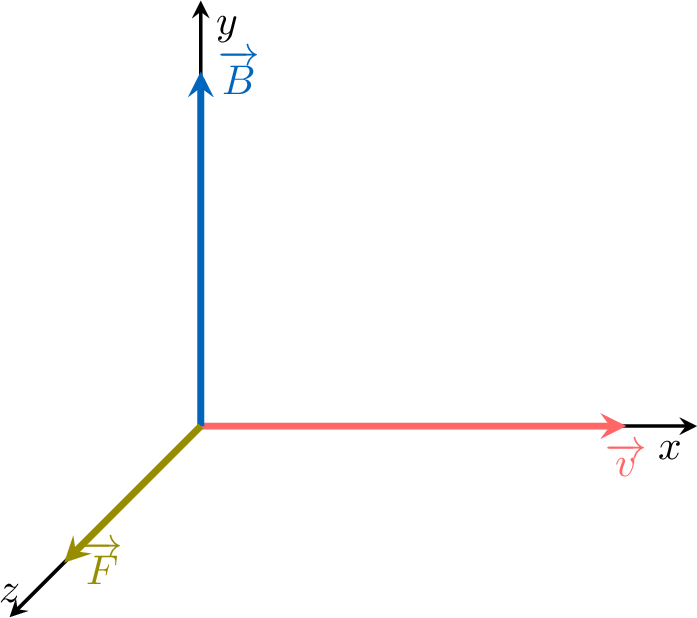
$$\begin{aligned}[t]\Vect{F} &= q(\Vect{v} \times \Vect{B}) \\
&= 1,6 \times 10^{-19} \left( \begin{pmatrix} 2 \times 10^5 \\
0 \\
0 \end{pmatrix} \times \begin{pmatrix} 0 \\
0,5 \\
0 \end{pmatrix} \right) \\
&= 1,6 \times 10^{-19} \begin{pmatrix} (0)(0) - (0)(0,5) \\
(0)(0) - (2 \times 10^5)(0) \\
(2 \times 10^5)(0,5) - (0)(0) \end{pmatrix} \\
&= 1,6 \times 10^{-19} \begin{pmatrix} 0 \\
0 \\
10^5 \end{pmatrix}\\
&= \begin{pmatrix} 0 \\
0 \\
1,6 \times 10^{-14} \end{pmatrix}\end{aligned}$$La force magnétique agissant sur la particule est \(\Vect{F} = \begin{pmatrix} 0 \\ 0 \\ 1,6 \times 10^{-14} \end{pmatrix}\) N. La force agit dans la direction positive de l'axe \(z\), perpendiculairement à la fois à la vitesse et au champ magnétique.
Velocity and Acceleration with Calculus
Selon la deuxième loi de Newton, \(\sum \Vect{F} = m\Vect{a}\) : lorsqu'une force nette agit sur un objet, elle provoque une accélération. Pour décrire ce mouvement, nous utilisons le calcul différentiel. Le vecteur vitesse est la dérivée du vecteur position, et le vecteur accélération est la dérivée du vecteur vitesse.
Définition Vitesse et accélération avec le calcul différentiel
- La vitesse instantanée \(\Vect{v}(t)\) est la dérivée du vecteur position \(\Vect{r}(t)\) par rapport au temps :$$ \Vect{v}(t) = \frac{d\Vect{r}}{dt} $$La vitesse (scalaire) de l'objet est la norme de son vecteur vitesse, \(|\Vect{v}|\).
- L'accélération instantanée \(\Vect{a}(t)\) est la dérivée du vecteur vitesse \(\Vect{v}(t)\) :$$ \Vect{a}(t) = \frac{d\Vect{v}}{dt} = \frac{d^2\Vect{r}}{dt^2} $$
Exemple
Une particule de masse \(m\) est lancée avec une vitesse initiale \(\Vect{v}(0) = \begin{pmatrix} 20 \\ 30 \end{pmatrix}\) m/s. La seule force agissant sur elle est la gravité, qui agit vers le bas. Trouver le vecteur vitesse \(\Vect{v}(t)\) de la particule à l'instant \(t\).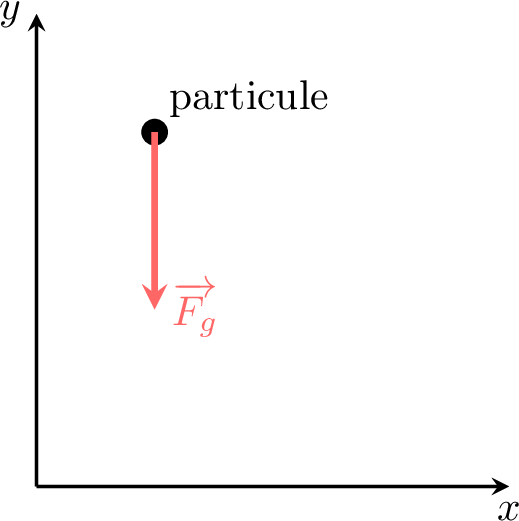
La force de gravité près de la surface de la Terre est \(\Vect{F_g} = \begin{pmatrix} 0 \\ -mg \end{pmatrix}\), où \(g \approx 9{,}8\) m/s² est l'accélération due à la gravité. Selon la deuxième loi de Newton, \(\sum \Vect{F} = m\Vect{a}\). La gravité étant la seule force, le vecteur accélération \(\Vect{a}(t)\) est :$$ m\Vect{a} = \begin{pmatrix} 0 \\
-mg \end{pmatrix} \implies \Vect{a} = \begin{pmatrix} 0 \\
-g \end{pmatrix} = \begin{pmatrix} 0 \\
-9{,}8 \end{pmatrix} \text{ m/s²} $$L'accélération est constante et dirigée vers le bas. Pour trouver le vecteur vitesse \(\Vect{v}(t)\), nous intégrons le vecteur accélération :$$ \Vect{v}(t) = \int \Vect{a}(t)\, dt = \int \begin{pmatrix} 0 \\
-9{,}8 \end{pmatrix} dt = \begin{pmatrix} C_1 \\
-9{,}8t + C_2 \end{pmatrix} $$Nous utilisons la condition initiale \(\Vect{v}(0) = \begin{pmatrix} 20 \\ 30 \end{pmatrix}\) pour trouver les constantes d'intégration \(C_1\) et \(C_2\) :$$ \begin{pmatrix} 20 \\
30 \end{pmatrix} = \begin{pmatrix} C_1 \\
-9{,}8(0) + C_2 \end{pmatrix} \implies \begin{pmatrix} C_1 \\
C_2 \end{pmatrix} = \begin{pmatrix} 20 \\
30 \end{pmatrix} $$Par conséquent, le vecteur vitesse à l'instant \(t\) est \(\Vect{v}(t) = \begin{pmatrix} 20 \\ 30 - 9{,}8t \end{pmatrix}\) m/s.
Mouvement à vitesse constante
Selon la deuxième loi de Newton, \(\sum \Vect{F} = m\Vect{a}\). Lorsque la force nette agissant sur un objet est nulle (\(\sum \Vect{F} = \Vect{0}\)), son accélération est également nulle (\(\Vect{a} = \Vect{0}\)).
On peut trouver la vitesse en intégrant le vecteur accélération par rapport au temps. Puisque l'accélération est le vecteur nul, on a :$$ \Vect{v}(t) = \int \Vect{a}(t)\, dt = \int \Vect{0}\, dt = \Vect{C} $$Le résultat est un vecteur constant, \(\Vect{C}\). Cela signifie que la vitesse ne change pas au cours du temps. Cette vitesse constante est simplement la vitesse initiale de l'objet, que nous appellerons \(\Vect{v_0}\).
Ensuite, on trouve le vecteur position en intégrant ce vecteur vitesse constant \(\Vect{v_0}\) :$$ \Vect{r}(t) = \int \Vect{v_0}\, dt = t\Vect{v_0} + \Vect{D} $$Ici, \(\Vect{D}\) est une autre constante d'intégration. Pour la déterminer, on utilise la condition initiale à \(t=0\). La position initiale est \(\Vect{r}(0) = \Vect{r_0}\). En substituant :$$ \Vect{r}(0) = (0)\Vect{v_0} + \Vect{D} \implies \Vect{r_0} = \Vect{D} $$Ainsi, la constante d'intégration est le vecteur position initial. Cela nous donne l'équation finale du mouvement pour un objet à vitesse constante :$$ \Vect{r}(t) = \Vect{r_0} + t\Vect{v_0} $$
On peut trouver la vitesse en intégrant le vecteur accélération par rapport au temps. Puisque l'accélération est le vecteur nul, on a :$$ \Vect{v}(t) = \int \Vect{a}(t)\, dt = \int \Vect{0}\, dt = \Vect{C} $$Le résultat est un vecteur constant, \(\Vect{C}\). Cela signifie que la vitesse ne change pas au cours du temps. Cette vitesse constante est simplement la vitesse initiale de l'objet, que nous appellerons \(\Vect{v_0}\).
Ensuite, on trouve le vecteur position en intégrant ce vecteur vitesse constant \(\Vect{v_0}\) :$$ \Vect{r}(t) = \int \Vect{v_0}\, dt = t\Vect{v_0} + \Vect{D} $$Ici, \(\Vect{D}\) est une autre constante d'intégration. Pour la déterminer, on utilise la condition initiale à \(t=0\). La position initiale est \(\Vect{r}(0) = \Vect{r_0}\). En substituant :$$ \Vect{r}(0) = (0)\Vect{v_0} + \Vect{D} \implies \Vect{r_0} = \Vect{D} $$Ainsi, la constante d'intégration est le vecteur position initial. Cela nous donne l'équation finale du mouvement pour un objet à vitesse constante :$$ \Vect{r}(t) = \Vect{r_0} + t\Vect{v_0} $$
Proposition Équation du mouvement avec une force nette nulle
Si la force nette sur un objet est nulle, sa vitesse reste constante. Le vecteur position de l'objet, \(\Vect{r}(t)\), à tout instant \(t\) est donné par l'équation :$$ \Vect{r}(t) = \Vect{r_0} + t\Vect{v_0} $$où \(\Vect{r_0}\) est le vecteur position initial à \(t=0\) et \(\Vect{v_0}\) est le vecteur vitesse constant.
Exemple
Un hélicoptère est à la position \((6, 9, 3)\) et se déplace à vitesse constante. Dix minutes plus tard, il est en \((3, 10, 2{,}5)\). Les distances sont en kilomètres. Trouver le vecteur vitesse et la vitesse de l'hélicoptère en km/h.
Le temps écoulé est de 10 minutes, soit \(t=\frac{10}{60} = \frac{1}{6}\) d'heure. À partir de l'équation du mouvement à vitesse constante, \(\Vect{r}(t) = \Vect{r_0} + t\Vect{v_0}\), on obtient :$$\begin{aligned}[t]\Vect{r}(t) &= \Vect{r_0} + t\Vect{v_0} \\
t\Vect{v_0} &= \Vect{r}(t) - \Vect{r_0} \\
\Vect{v_0} &= \frac{\Vect{r}(t) - \Vect{r_0}}{t} \\
&= \frac{1}{1/6} \begin{pmatrix} 3-6 \\
10-9 \\
2{,}5-3 \end{pmatrix} \\
&= 6 \begin{pmatrix} -3 \\
1 \\
-0{,}5 \end{pmatrix} \\
&= \begin{pmatrix} -18 \\
6 \\
-3 \end{pmatrix} \text{ km/h}\end{aligned}$$La vitesse (scalaire) est la norme du vecteur vitesse :$$\begin{aligned}[t]\text{Vitesse} &= |\Vect{v_0}|\\
&= \sqrt{(-18)^2 + 6^2 + (-3)^2} \\
&= \sqrt{324 + 36 + 9} \\
&= \sqrt{369} \\
&\approx 19{,}2 \text{ km/h}\end{aligned}$$