Équations différentielles couplées
Dans le chapitre précédent, nous avons étudié des équations différentielles décrivant une seule quantité évoluant dans le temps. Cependant, dans le monde réel, les systèmes impliquent souvent plusieurs variables qui interagissent les unes avec les autres. Par exemple, la population de prédateurs (comme les renards) dépend de la population de proies (comme les lapins), et vice versa.
Ces situations sont modélisées par des équations différentielles couplées. Dans ce chapitre, nous apprendrons à visualiser ces systèmes à l'aide de portraits de phase, à résoudre des systèmes d'équations linéaires à l'aide de matrices, de valeurs propres et de vecteurs propres, et à approximer des solutions à l'aide de la méthode d'Euler.
Ces situations sont modélisées par des équations différentielles couplées. Dans ce chapitre, nous apprendrons à visualiser ces systèmes à l'aide de portraits de phase, à résoudre des systèmes d'équations linéaires à l'aide de matrices, de valeurs propres et de vecteurs propres, et à approximer des solutions à l'aide de la méthode d'Euler.
Définitions et équilibre
Définition Système d'équations différentielles couplées du premier ordre
Un système d'équations différentielles couplées du premier ordre prend généralement la forme :$$\begin{cases}\dfrac{dx}{dt} = f(x, y) \\
\dfrac{dy}{dt} = g(x, y)\end{cases}$$Ici, \(t\) est la variable indépendante (souvent le temps), tandis que \(x\) et \(y\) sont les variables dépendantes (variables d'état).
On note souvent les dérivées temporelles par la notation pointée : \(\dot{x} = \dfrac{dx}{dt}\) et \(\dot{y} = \dfrac{dy}{dt}\).
On note souvent les dérivées temporelles par la notation pointée : \(\dot{x} = \dfrac{dx}{dt}\) et \(\dot{y} = \dfrac{dy}{dt}\).
Définition Points d'équilibre
Un point d'équilibre est un état où le système ne change pas. Cela se produit lorsque les deux dérivées sont nulles simultanément :$$ \frac{dx}{dt} = 0 \quad \text{et} \quad \frac{dy}{dt} = 0 $$
Exemple
Considérons le système :$$ \frac{dx}{dt} = y \quad \text{et} \quad \frac{dy}{dt} = -x $$Pour trouver les points d'équilibre, nous annulons les deux dérivées :$$ y = 0 \quad \text{et} \quad -x = 0 $$La seule solution est \((x, y) = (0, 0)\). L'origine est donc le seul point d'équilibre.
Portrait de phase
Définition Portrait de phase
Un portrait de phase est une représentation graphique où :
- Les axes représentent les variables d'état \(x\) et \(y\) (et non \(t\)).
- En chaque point \((x, y)\), le vecteur \(\begin{pmatrix} \dot{x} \\ \dot{y} \end{pmatrix}\) indique la direction et la vitesse de variation.
- Les trajectoires sont des courbes qui suivent le flux de ces vecteurs, montrant comment l'état du système évolue au cours du temps à partir d'une condition initiale spécifique.
Exemple
Considérons le système :$$ \frac{dx}{dt} = y \quad \text{et} \quad \frac{dy}{dt} = -x $$Calculons le vecteur vitesse en quelques points :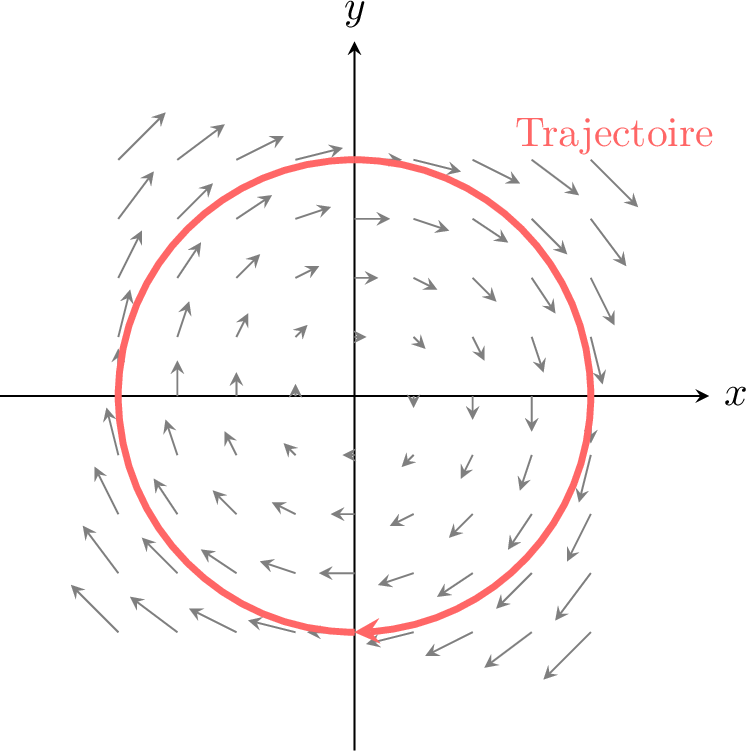
- En \((1, 0)\), le vecteur est \(\begin{pmatrix} 0 \\ -1 \end{pmatrix}\) (vers le bas).
- En \((0, -1)\), le vecteur est \(\begin{pmatrix} -1 \\ 0 \end{pmatrix}\) (vers la gauche).
- En \((-1, 0)\), le vecteur est \(\begin{pmatrix} 0 \\ 1 \end{pmatrix}\) (vers le haut).
- En \((0, 1)\), le vecteur est \(\begin{pmatrix} 1 \\ 0 \end{pmatrix}\) (vers la droite).
Équations différentielles linéaires couplées
Un type fondamental de système couplé est le système linéaire à coefficients constants.
Ces systèmes peuvent être élégamment résolus à l'aide de l'algèbre matricielle. En définissant un vecteur \(X=\begin{pmatrix} x \\ y \end{pmatrix}\) et une matrice \(A\), nous pouvons condenser le système sous la forme compacte \(\dot{X}=AX\).
Ces systèmes peuvent être élégamment résolus à l'aide de l'algèbre matricielle. En définissant un vecteur \(X=\begin{pmatrix} x \\ y \end{pmatrix}\) et une matrice \(A\), nous pouvons condenser le système sous la forme compacte \(\dot{X}=AX\).
Définition Équations différentielles linéaires couplées
Un système d'équations différentielles linéaires couplées est un ensemble d'équations de la forme :$$\begin{cases}\dfrac{dx}{dt} = ax + by \\
\dfrac{dy}{dt} = cx + dy\end{cases}$$Ceci peut s'écrire sous forme matricielle :$$ \begin{pmatrix} \dot{x} \\
\dot{y} \end{pmatrix} = \begin{pmatrix} a & b \\
c & d \end{pmatrix} \begin{pmatrix} x \\
y \end{pmatrix} \iff \dot{X}=AX $$où \(A=\begin{pmatrix} a & b \\ c & d \end{pmatrix}\) est la matrice des coefficients et \(X=\begin{pmatrix} x \\ y \end{pmatrix}\) est le vecteur d'état.
Pour trouver la solution, nous cherchons un analogue à la solution scalaire \(x = x_0 e^{kt}\).
Si nous proposons une solution d'essai de la forme \(X = v\,e^{\lambda t}\), la dérivation donne \(\dot{X}=\lambda v\,e^{\lambda t}\). En substituant dans le système, on obtient :$$ \lambda v\,e^{\lambda t} = A\bigl(v\,e^{\lambda t}\bigr) \implies Av=\lambda v $$Cette équation est vraie précisément lorsque \(\lambda\) est une valeur propre de \(A\) et \(v\) est un vecteur propre associé.
Si nous proposons une solution d'essai de la forme \(X = v\,e^{\lambda t}\), la dérivation donne \(\dot{X}=\lambda v\,e^{\lambda t}\). En substituant dans le système, on obtient :$$ \lambda v\,e^{\lambda t} = A\bigl(v\,e^{\lambda t}\bigr) \implies Av=\lambda v $$Cette équation est vraie précisément lorsque \(\lambda\) est une valeur propre de \(A\) et \(v\) est un vecteur propre associé.
Proposition Solution générale utilisant les valeurs propres
Soient \(\lambda_1\) et \(\lambda_2\) les valeurs propres réelles distinctes de la matrice \(A\), avec les vecteurs propres correspondants \(v_1\) et \(v_2\). La solution générale est :$$ X(t)=\alpha e^{\lambda_1 t}v_1+\beta e^{\lambda_2 t}v_2 $$où \(\alpha\) et \(\beta\) sont des constantes arbitraires déterminées par les conditions initiales.
Exemple
Résoudre le système \(\begin{cases} \dfrac{dx}{dt} = 4x - 2y \\ \dfrac{dy}{dt} = x + y \end{cases}\).
La matrice est \(A=\begin{pmatrix} 4 & -2 \\ 1 & 1 \end{pmatrix}\).
- Trouver les valeurs propres : $$\begin{aligned}\det(A-\lambda I)&=0\\ (4-\lambda)(1-\lambda)-(-2)(1)&=0\\ 4-5\lambda+\lambda^2+2&=0\\ \lambda^2-5\lambda+6&=0\\ (\lambda-3)(\lambda-2)&=0\end{aligned}$$Les valeurs propres sont \(\lambda_1=3\) et \(\lambda_2=2\).
- Trouver le vecteur propre pour \(\lambda_1 = 3\) : $$A\begin{pmatrix} x \\ y \end{pmatrix}=3\begin{pmatrix} x \\ y \end{pmatrix}\implies\begin{pmatrix} 1 & -2 \\ 1 & -2 \end{pmatrix}\begin{pmatrix} x \\ y \end{pmatrix}=\begin{pmatrix} 0 \\ 0 \end{pmatrix}$$\(x-2y=0\implies x=2y\). On pose \(y=1\), donc \(x=2\). Ainsi \(v_1=\begin{pmatrix}2\\1\end{pmatrix}\).
- Trouver le vecteur propre pour \(\lambda_2 = 2\) : $$A\begin{pmatrix} x \\ y \end{pmatrix}=2\begin{pmatrix} x \\ y \end{pmatrix}\implies\begin{pmatrix} 2 & -2 \\ 1 & -1 \end{pmatrix}\begin{pmatrix} x \\ y \end{pmatrix}=\begin{pmatrix} 0 \\ 0 \end{pmatrix}$$\(x-y=0\implies x=y\). On pose \(y=1\), donc \(x=1\). Ainsi \(v_2=\begin{pmatrix}1\\1\end{pmatrix}\).
Proposition Classification des points d'équilibre
Nous pouvons décrire le comportement du portrait de phase au voisinage d'un point d'équilibre (après translation à l'origine) en fonction des valeurs propres \(\lambda_1, \lambda_2\) de la matrice du système.
| Nœud Stable (Puits) | Point-Selle | Nœud Instable (Source) |
| {\small \(\lambda_1, \lambda_2 < 0\)} | {\small \(\lambda_1 > 0 > \lambda_2\)} | {\small \(\lambda_1, \lambda_2 > 0\)} |
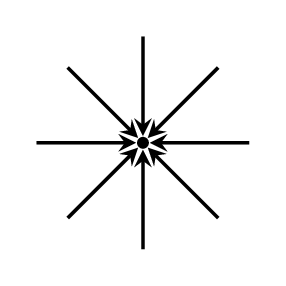 | 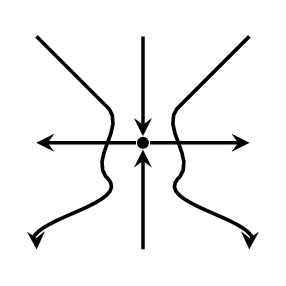 | 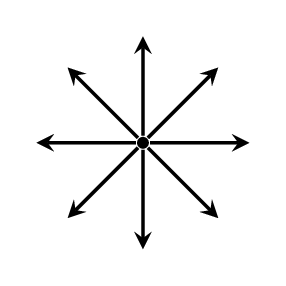 |
| Foyer Stable | Centre | Foyer Instable |
| {\small Complexes, Re\((\lambda) < 0\)} | {\small Imaginaires purs} | {\small Complexes, Re\((\lambda) > 0\)} |
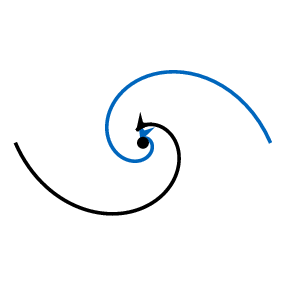 | 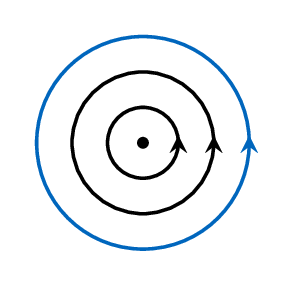 | 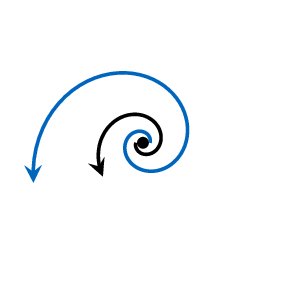 |
Équations différentielles du second ordre
Les équations différentielles du second ordre jouent un rôle crucial en physique et en ingénierie. Comme la deuxième loi de Newton relie la force à l'accélération (la dérivée seconde de la position), ces équations décrivent naturellement les vibrations mécaniques, telles que les ressorts, les amortisseurs et les pendules. De même, en électronique, elles sont essentielles pour modéliser le comportement des circuits électriques RLC.
Définition Équation différentielle linéaire homogène du second ordre
Une équation différentielle linéaire homogène du second ordre à coefficients constants est une équation de la forme :$$ a\frac{d^2x}{dt^2} + b\frac{dx}{dt} + cx = 0 $$où \(a, b\) et \(c\) sont des constantes et \(a \neq 0\).
- Second ordre : La dérivée la plus élevée est la dérivée seconde.
- Linéaire : La variable \(x\) et ses dérivées apparaissent à la puissance un et ne sont pas multipliées entre elles.
- Homogène : L'équation est égale à zéro (il n'y a pas de terme de forçage externe).
Méthode Réduction à un système
Toute équation différentielle linéaire homogène du second ordre de la forme$$ a\frac{d^2x}{dt^2} + b\frac{dx}{dt} + cx = 0 $$peut être convertie en un système de deux équations du premier ordre.
- Introduire une nouvelle variable \(y = \dfrac{dx}{dt}\) (vitesse).
- Dériver \(y\) : \(\dfrac{dy}{dt} = \dfrac{d^2x}{dt^2}\).
- Réarranger l'équation originale : \(\dfrac{dy}{dt} = -\frac{b}{a}y - \frac{c}{a}x\).
- Écrire sous forme de système matriciel : $$ \begin{pmatrix} \dfrac{dx}{dt} \\ \dfrac{dy}{dt} \end{pmatrix}= \begin{pmatrix} 0 & 1 \\ -\frac{c}{a} & -\frac{b}{a} \end{pmatrix}\begin{pmatrix} x \\ y \end{pmatrix} $$
Exemple
Convertir l'équation différentielle du second ordre \(\dfrac{d^2x}{dt^2} + 3\dfrac{dx}{dt} + 2x = 0\) en un système d'équations couplées du premier ordre.
Posons \(y = \dfrac{dx}{dt}\). Alors :$$ \begin{aligned}\dfrac{dy}{dt} &= \frac{d}{dt}\left(\frac{dx}{dt}\right) = \frac{d^2x}{dt^2} \\
\end{aligned} $$À partir de l'équation originale, nous réarrangeons pour isoler la dérivée seconde :$$ \frac{d^2x}{dt^2} = -2x - 3\frac{dx}{dt} $$En substituant \(y\) dans cette expression :$$ \dfrac{dy}{dt} = -2x - 3y $$Le système d'équations couplées est :$$\begin{cases}\dfrac{dx}{dt} = y \\
\dfrac{dy}{dt} = -2x - 3y\end{cases}$$
Méthode d'Euler pour systèmes couplés
Lorsque les solutions exactes sont difficiles à trouver (par exemple, systèmes non linéaires), nous utilisons la méthode d'Euler pour approximer la trajectoire. Pour un système \(\dfrac{dx}{dt} = f(x, y)\) et \(\dfrac{dy}{dt} = g(x, y)\) avec un pas \(h\) :
Méthode Formules itératives
Étant donné les valeurs initiales \((x_n, y_n)\) au temps \(t_n\) :
- Calculer les pentes : \(m_x = f(x_n, y_n)\) et \(m_y = g(x_n, y_n)\).
- Mettre à jour les variables : $$ x_{n+1} = x_n + h \cdot m_x $$$$ y_{n+1} = y_n + h \cdot m_y $$$$ t_{n+1} = t_n + h $$
Exemple
Approximer la solution pour \(\begin{cases} \dfrac{dx}{dt} = x + y \\ \dfrac{dy}{dt} = x - y \end{cases}\) avec condition initiale \(x(0)=1, y(0)=0\) et pas \(h=0{,}1\).
- Étape 0 : \(t_0=0,\ x_0=1,\ y_0=0\).
- Étape 1 : $$ \dfrac{dx}{dt}\bigg|_{(1\,;\,0)} = 1+0 = 1 \implies x_1 = 1 + 0{,}1(1) = 1{,}1 $$$$ \dfrac{dy}{dt}\bigg|_{(1\,;\,0)} = 1-0 = 1 \implies y_1 = 0 + 0{,}1(1) = 0{,}1 $$
- Étape 2 : $$ \dfrac{dx}{dt}\bigg|_{(1{,}1\,;\,0{,}1)} = 1{,}1 + 0{,}1 = 1{,}2 \implies x_2 = 1{,}1 + 0{,}1(1{,}2) = 1{,}22 $$$$ \dfrac{dy}{dt}\bigg|_{(1{,}1\,;\,0{,}1)} = 1{,}1 - 0{,}1 = 1{,}0 \implies y_2 = 0{,}1 + 0{,}1(1{,}0) = 0{,}2 $$