Algèbre Vectorielle
Les vecteurs sont des objets mathématiques possédant à la fois une norme et une direction. Ils sont fondamentaux en mathématiques et en sciences pour décrire des grandeurs physiques telles que le déplacement, la vitesse, la force et les champs. Dans ce chapitre, nous formaliserons le concept de vecteurs dans l'espace bi- et tridimensionnel, en établissant le cadre algébrique pour leur manipulation. Cette structure algébrique offre un pont puissant vers l'intuition géométrique, nous permettant de modéliser et de résoudre des problèmes complexes.
Définitions
Déplacer une figure par translation, c'est la faire glisser sans la faire tourner. Pour décrire ce mouvement, on utilise une flèche \(\vec{u}\) appelée vecteur. Pour translater tous les points avec un vecteur, on peut utiliser :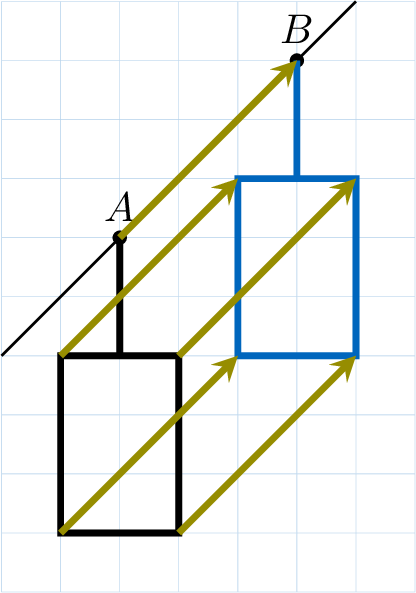
- la longueur de la flèche, la direction et le sens de la flèche ;
- la composante horizontale (en \(x\)) et la composante verticale (en \(y\)) de la flèche (combien d'unités vers la droite/gauche et vers le haut/bas).
Définition Vecteur
Un vecteur est défini par :
- Géométriquement, comme un segment de droite orienté, caractérisé par une norme (longueur), une direction et un sens.
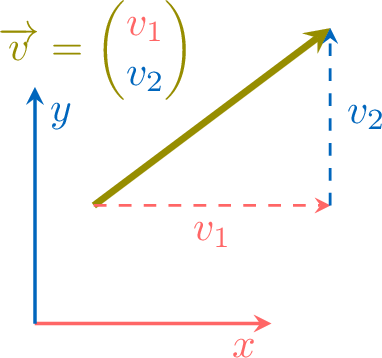
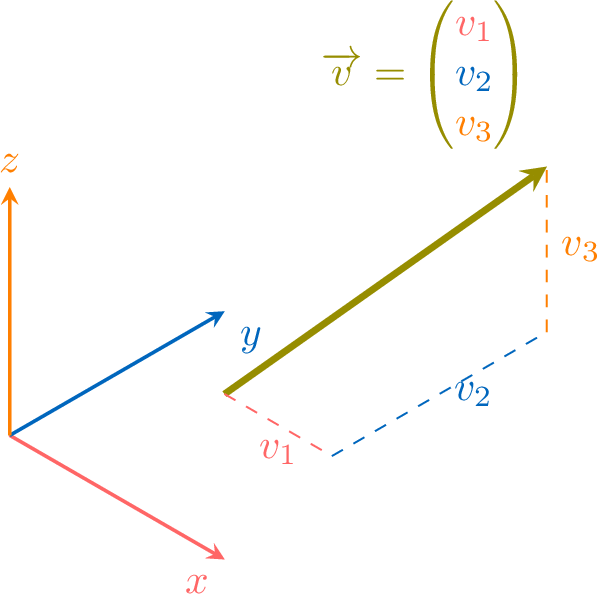
- Algébriquement, comme un ensemble ordonné de composantes. Dans un repère cartésien, un vecteur en 2D est \(\Vect{v} = \begin{pmatrix} v_1 \\ v_2 \end{pmatrix}\) et en 3D est \(\Vect{v} = \begin{pmatrix} v_1 \\ v_2 \\ v_3 \end{pmatrix}\).
Notation à deux points
Définition Notation à deux points
Le vecteur d'un point de départ \(A\) à un point d'arrivée \(B\) est noté \(\Vect{AB}\).
Proposition Coordonnées de \(\Vect{AB}\)
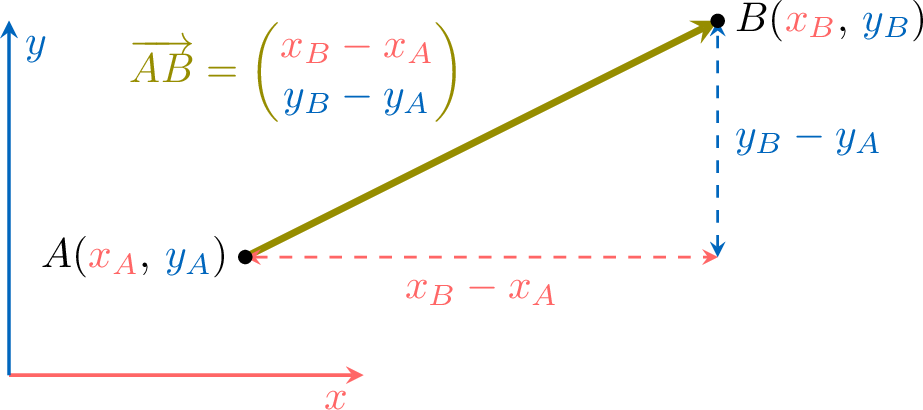
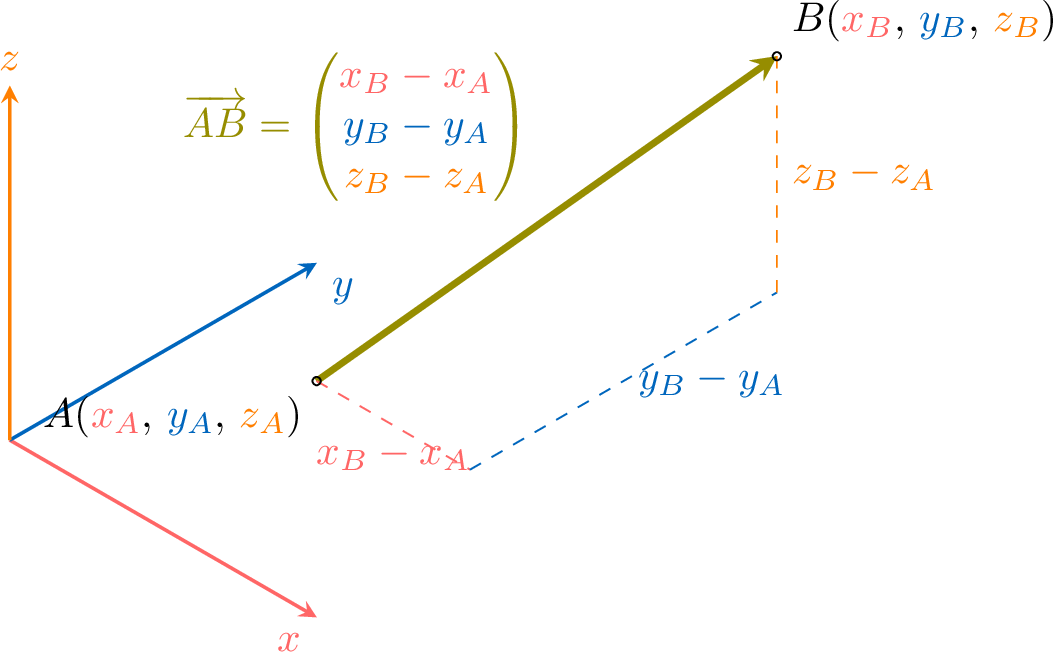
Les coordonnées du vecteur \(\Vect{AB}\) sont obtenues en soustrayant les coordonnées du point de départ de celles du point d'arrivée.
- En 2D, pour les points \(A(x_A, y_A)\) et \(B(x_B, y_B)\) : $$\Vect{AB} = \begin{pmatrix}x_B - x_A \\
y_B - y_A\end{pmatrix}$$
- En 3D, pour les points \(A(x_A, y_A, z_A)\) et \(B(x_B, y_B, z_B)\) : $$\Vect{AB} = \begin{pmatrix}x_B - x_A \\
y_B - y_A \\
z_B - z_A \end{pmatrix}$$
Égalité entre vecteurs
Deux vecteurs sont considérés comme égaux s'ils représentent exactement le même déplacement, indépendamment de leur point de départ.
Définition Égalité géométrique de vecteurs
Deux vecteurs sont égaux s'ils ont :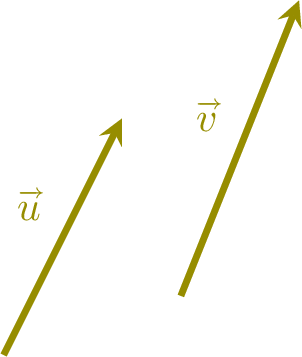
\(\textcolor{olive}{\Vect{u}} = \textcolor{olive}{\Vect{v}}\)
- la même direction (ils sont parallèles),
- le même sens,
- et la même norme (longueur).
\(\textcolor{olive}{\Vect{u}} = \textcolor{olive}{\Vect{v}}\)
Définition Égalité algébrique de vecteurs
Deux vecteurs sont égaux si leurs composantes correspondantes sont égales.
- En 2D : \(\begin{pmatrix}x\\y\end{pmatrix} = \begin{pmatrix}x'\\y'\end{pmatrix} \iff x = x' \text{ et } y = y'\).
- En 3D : \(\begin{pmatrix}x\\y\\z\end{pmatrix} = \begin{pmatrix}x'\\y'\\z'\end{pmatrix} \iff x = x',\; y = y', \text{ et } z = z'\).
Proposition Critère du parallélogramme
Pour quatre points \(A\), \(B\), \(C\) et \(D\) tels qu'aucun triplet ne soit aligné, les vecteurs \(\Vect{AB}\) et \(\Vect{DC}\) sont égaux si et seulement si le quadrilatère \(ABCD\) est un parallélogramme.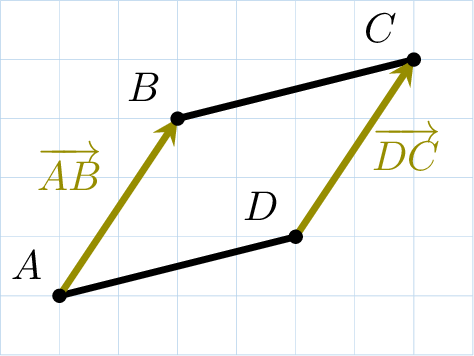
Addition et soustraction de vecteurs
Supposons que nous effectuons une translation de vecteur \(\Vect{u}\) suivie d'une translation de vecteur \(\Vect{v}\). C'est équivalent à une unique translation par un vecteur résultant, que nous appelons la somme \(\Vect{u}+\Vect{v}\).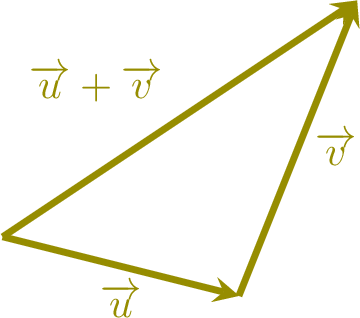
Définition Addition de vecteurs
La somme de deux vecteurs s'obtient en additionnant leurs composantes correspondantes.
- En 2D :\(\begin{pmatrix}u_1\\ u_2\end{pmatrix}+\begin{pmatrix}v_1\\ v_2\end{pmatrix}=\begin{pmatrix}u_1+v_1\\ u_2+v_2 \end{pmatrix}\)
- En 3D :\(\begin{pmatrix}u_1\\ u_2 \\ u_3\end{pmatrix}+\begin{pmatrix}v_1\\ v_2 \\ v_3\end{pmatrix}=\begin{pmatrix}u_1+v_1\\ u_2+v_2 \\ u_3+v_3 \end{pmatrix}\)
Proposition Relation de Chasles
Pour trois points quelconques \(A\), \(B\) et \(C\), le vecteur de \(A\) à \(C\) est la somme du vecteur de \(A\) à \(B\) et du vecteur de \(B\) à \(C\) :$$\Vect{AB} + \Vect{BC} = \Vect{AC}.$$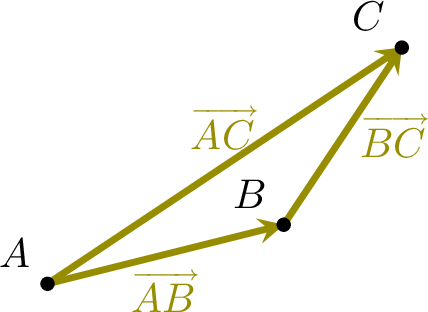
Définition Vecteur nul
Le vecteur nul, noté \(\Vect{0}\), est le vecteur dont toutes les composantes sont nulles. C'est l'élément neutre de l'addition, ce qui signifie que pour tout vecteur \(\Vect{v}\) :$$ \Vect{v} + \Vect{0} = \Vect{v}. $$Pour tout point \(A\), le vecteur de \(A\) à \(A\) est le vecteur nul : \(\Vect{AA} = \Vect{0}\).
Définition Vecteur opposé
Pour tout vecteur \(\Vect{v}\), il existe un vecteur opposé, noté \(-\Vect{v}\), tel que leur somme est le vecteur nul :$$ \Vect{v} + (-\Vect{v}) = \Vect{0}. $$Géométriquement, \(-\Vect{v}\) a la même norme et la même direction que \(\Vect{v}\) mais un sens opposé. Algébriquement, ses composantes sont les opposées des composantes de \(\Vect{v}\).
- En 2D :\( -\begin{pmatrix}v_1\\ v_2 \\ \end{pmatrix}=\begin{pmatrix}-v_1\\ -v_2 \\ \end{pmatrix} \)
- En 3D :\( -\begin{pmatrix}v_1\\ v_2 \\ v_3\end{pmatrix}=\begin{pmatrix}-v_1\\ -v_2 \\ -v_3 \end{pmatrix} \)
Définition Soustraction de vecteurs
La soustraction du vecteur \(\Vect{v}\) au vecteur \(\Vect{u}\) est définie comme l'addition de l'opposé de \(\Vect{v}\) :$$\Vect{u}-\Vect{v} = \Vect{u} + (-\Vect{v}).$$Les composantes sont obtenues en soustrayant les composantes correspondantes.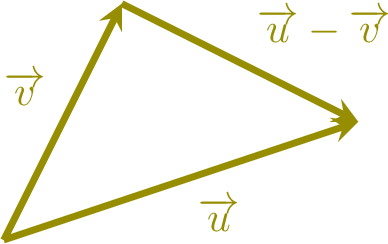
- En 2D :\(\begin{pmatrix}u_1\\ u_2\end{pmatrix}-\begin{pmatrix}v_1\\ v_2\end{pmatrix}=\begin{pmatrix}u_1-v_1\\ u_2-v_2 \end{pmatrix}\)
- En 3D :\(\begin{pmatrix}u_1\\ u_2 \\ u_3\end{pmatrix}-\begin{pmatrix}v_1\\ v_2 \\ v_3\end{pmatrix}=\begin{pmatrix}u_1-v_1\\ u_2-v_2 \\ u_3-v_3 \end{pmatrix}\)
Multiplication par un scalaire
Multiplier un vecteur par un nombre réel (un scalaire) est une opération qui met le vecteur à l'échelle. Cela signifie qu'elle modifie la norme (longueur) du vecteur et peut également en inverser le sens.
Définition Multiplication par un scalaire
Le produit d'un scalaire \(k \in \mathbb{R}\) et d'un vecteur \(\Vect{v}\) est le vecteur \(k\Vect{v}\), obtenu en multipliant chaque composante de \(\Vect{v}\) par \(k\).
- En 2D :\(k\Vect{v} = k\begin{pmatrix} v_1 \\ v_2 \end{pmatrix} = \begin{pmatrix} kv_1 \\ kv_2 \end{pmatrix}\)
- En 3D :\(k\Vect{v} = k\begin{pmatrix} v_1 \\ v_2 \\ v_3 \end{pmatrix} = \begin{pmatrix} kv_1 \\ kv_2 \\ kv_3 \end{pmatrix}\)
Proposition Effet géométrique de la multiplication par un scalaire
La multiplication d'un vecteur \(\Vect{v}\) par un scalaire \(k\) donne un nouveau vecteur \(k\Vect{v}\) qui est colinéaire à \(\Vect{v}\).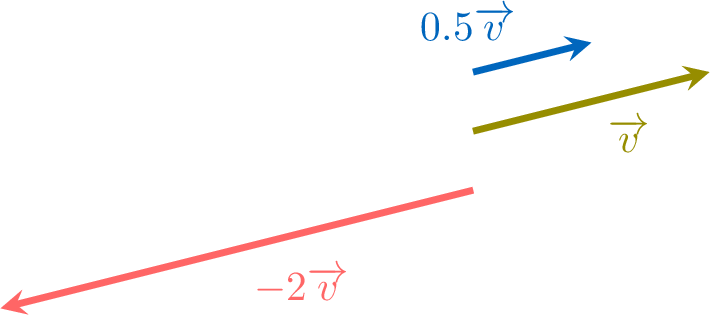
- Si \(k > 0\), \(k\Vect{v}\) a le même sens que \(\Vect{v}\).
- Si \(k < 0\), \(k\Vect{v}\) a le sens opposé à \(\Vect{v}\).
- Si \(k = 0\), le résultat est le vecteur nul : \(0\Vect{v} = \Vect{0}\).
Norme et vecteurs unitaires
La norme d'un vecteur est sa longueur. C'est une quantité scalaire, notée \(\|\Vect{v}\|\). Nous pouvons la calculer en appliquant le théorème de Pythagore à ses composantes.
Définition Norme d'un vecteur
La norme d'un vecteur \(\Vect{v}\) est la racine carrée de la somme des carrés de ses composantes.
- En 2D, pour \(\Vect{v} = \begin{pmatrix} v_1 \\ v_2 \end{pmatrix}\) : $$ \|\Vect{v}\| = \sqrt{v_1^2 + v_2^2 }. $$
- En 3D, pour \(\Vect{v} = \begin{pmatrix} v_1 \\ v_2 \\ v_3 \end{pmatrix}\) : $$ \|\Vect{v}\| = \sqrt{v_1^2 + v_2^2 + v_3^2}. $$
Définition Vecteur unitaire
Un vecteur unitaire est un vecteur \(\Vect{v}\) de norme 1, tel que \(\|\Vect{v}\|=1\).
Exemple
Les vecteurs de la base canonique \(\Vect{i}\), \(\Vect{j}\) et \(\Vect{k}\) sont tous des vecteurs unitaires.
Méthode Normalisation
Le processus consistant à trouver un vecteur unitaire dans la même direction qu'un vecteur donné est appelé la normalisation. Pour trouver le vecteur unitaire dans la direction d'un vecteur non nul \(\Vect{v}\), on divise le vecteur par sa propre norme :$$ \frac{\Vect{v}}{\|\Vect{v}\|}. $$
Vecteurs de base
Lorsque nous représentons des vecteurs dans le plan cartésien, nous nous déplaçons d'abord dans la direction de l'axe des \(x\), puis dans la direction de l'axe des \(y\).
Par exemple, pour représenter le vecteur \(\Vect{v}=\begin{pmatrix} 2 \\ 3 \end{pmatrix}\), nous nous déplaçons de 2 unités dans la direction des \(x\), puis de 3 unités dans la direction des \(y\).
Soit \(\Vect{i}=\begin{pmatrix} 1 \\ 0 \end{pmatrix}\) une translation de 1 unité dans la direction positive des \(x\) et \(\Vect{j}=\begin{pmatrix} 0 \\ 1 \end{pmatrix}\) une translation de 1 unité dans la direction positive des \(y\). Ce déplacement est équivalent à 2 fois \(\Vect{i}\) plus 3 fois \(\Vect{j}\) :$$\begin{aligned}\Vect{v} & =2 \Vect{i}+3 \Vect{j} \\ \begin{pmatrix} 2 \\ 3 \end{pmatrix} & =2\begin{pmatrix} 1 \\ 0 \end{pmatrix}+3\begin{pmatrix} 0 \\ 1 \end{pmatrix}\end{aligned}$$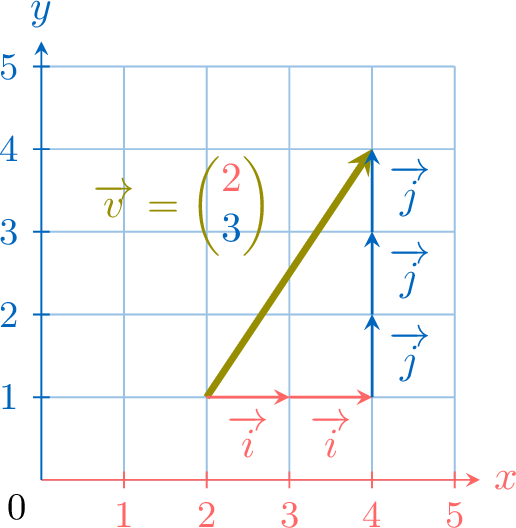
Par exemple, pour représenter le vecteur \(\Vect{v}=\begin{pmatrix} 2 \\ 3 \end{pmatrix}\), nous nous déplaçons de 2 unités dans la direction des \(x\), puis de 3 unités dans la direction des \(y\).
Soit \(\Vect{i}=\begin{pmatrix} 1 \\ 0 \end{pmatrix}\) une translation de 1 unité dans la direction positive des \(x\) et \(\Vect{j}=\begin{pmatrix} 0 \\ 1 \end{pmatrix}\) une translation de 1 unité dans la direction positive des \(y\). Ce déplacement est équivalent à 2 fois \(\Vect{i}\) plus 3 fois \(\Vect{j}\) :$$\begin{aligned}\Vect{v} & =2 \Vect{i}+3 \Vect{j} \\ \begin{pmatrix} 2 \\ 3 \end{pmatrix} & =2\begin{pmatrix} 1 \\ 0 \end{pmatrix}+3\begin{pmatrix} 0 \\ 1 \end{pmatrix}\end{aligned}$$
Définition Vecteurs de base
Les vecteurs de la base canonique sont des vecteurs unitaires le long des axes de coordonnées.
- En 2D : \(\Vect{i} = \begin{pmatrix} 1 \\ 0 \end{pmatrix}\) et \(\Vect{j} = \begin{pmatrix} 0 \\ 1 \end{pmatrix}\). Tout vecteur peut s'écrire :$$\Vect{v} = \underbrace{v_1\Vect{i} + v_2\Vect{j}}_{\textcolor{colordef}{\text{décomposition dans la base}}}=\underbrace{\begin{pmatrix} v_1 \\ v_2 \end{pmatrix}}_{\textcolor{colordef}{\text{forme en composantes}}}$$
- En 3D : \(\Vect{i} = \begin{pmatrix} 1 \\ 0 \\ 0 \end{pmatrix}\), \(\Vect{j} = \begin{pmatrix} 0 \\ 1 \\ 0 \end{pmatrix}\), et \(\Vect{k} = \begin{pmatrix} 0 \\ 0 \\ 1 \end{pmatrix}\). Tout vecteur peut s'écrire :$$\Vect{v} = \underbrace{v_1\Vect{i} + v_2\Vect{j}+ v_3\Vect{k}}_{\textcolor{colordef}{\text{décomposition dans la base}}}=\underbrace{\begin{pmatrix} v_1 \\ v_2\\ v_3 \\ \end{pmatrix}}_{\textcolor{colordef}{\text{forme en composantes}}}$$
Définition Base quelconque
Un ensemble de vecteurs forme une base si tout vecteur de cet espace peut être représenté de manière unique comme une combinaison linéaire de ces vecteurs.
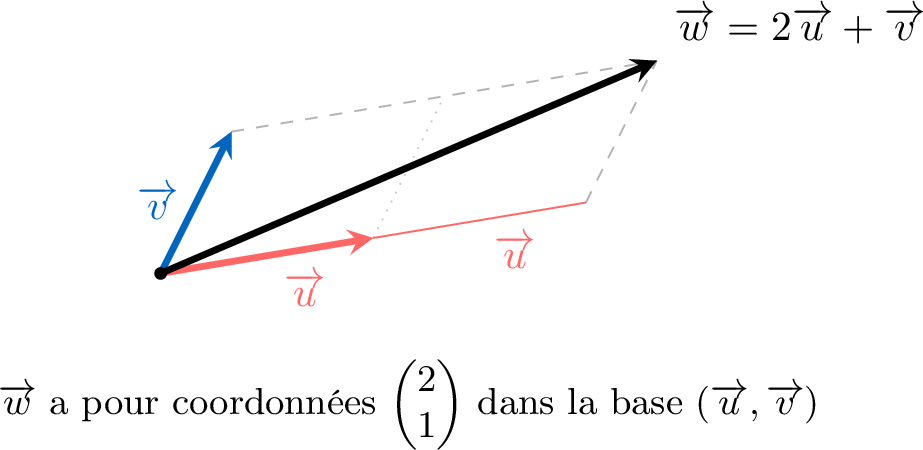
- En 2D : Étant donnée une base \((\Vect{u}, \Vect{v})\) du plan, tout vecteur \(\Vect{w}\) peut s’écrire de manière unique : $$\Vect{w} = a\Vect{u} + b\Vect{v}$$ Les valeurs \(\begin{pmatrix} a \\ b \end{pmatrix}\) sont les coordonnées de \(\Vect{w}\) dans la base \((\Vect{u}, \Vect{v})\).
- En 3D : Étant donnée une base \((\Vect{u}, \Vect{v}, \Vect{w})\) de l’espace, tout vecteur \(\Vect{r}\) peut s’écrire de manière unique : $$\Vect{r} = a\Vect{u} + b\Vect{v} + c\Vect{w}$$ Les valeurs \(\begin{pmatrix} a \\ b \\ c \end{pmatrix}\) sont les coordonnées de \(\Vect{r}\) dans la base \((\Vect{u}, \Vect{v}, \Vect{w})\).
Exemple
Vecteurs colinéaires et alignement
Deux vecteurs sont dits colinéaires s'ils ont la même direction. Cela signifie qu'ils se trouvent sur la même droite ou sur des droites parallèles. Le concept de vecteurs colinéaires est fondamental pour déterminer si des droites sont parallèles ou si des points sont alignés.
Définition Vecteurs colinéaires
Deux vecteurs \(\Vect{u}\) et \(\Vect{v}\) sont colinéaires si l'un est un multiple scalaire de l'autre (même direction). C'est-à-dire s'il existe un nombre réel \(k\) tel que :$$\Vect{u} = k \Vect{v}.$$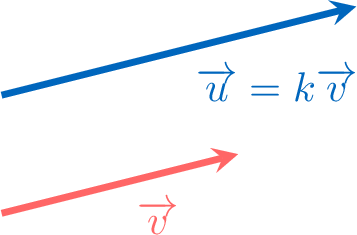
Remarques
- Cela implique que les composantes de deux vecteurs colinéaires sont proportionnelles.
- Le vecteur nul \(\Vect{0}\) est colinéaire à tout vecteur \(\Vect{u}\), car \(\Vect{0} = 0 \cdot \Vect{u}\).
Proposition Applications géométriques
- Deux droites \(\LineFr{AB}\) et \(\LineFr{CD}\) sont parallèles si et seulement si leurs vecteurs directeurs \(\Vect{AB}\) et \(\Vect{CD}\) sont colinéaires.
- Trois points \(A\), \(B\) et \(C\) sont alignés si et seulement si les vecteurs \(\Vect{AB}\) et \(\Vect{AC}\) sont colinéaires.
Définition Déterminant de deux vecteurs
Soient \(\Vect{u} = \begin{pmatrix} x \\ y \end{pmatrix}\) et \(\Vect{v} = \begin{pmatrix} x' \\ y' \end{pmatrix}\) deux vecteurs du plan. Le déterminant de \(\Vect{u}\) et \(\Vect{v}\) est le nombre réel :$$\det(\Vect{u},\,\Vect{v}) =\begin{vmatrix}x & x' \\
y & y'\end{vmatrix}= xy' - yx'.$$
Proposition Condition de colinéarité
Deux vecteurs \(\Vect{u}\) et \(\Vect{v}\) d'un plan sont colinéaires si et seulement si leur déterminant est nul :$$\det(\Vect{u},\,\Vect{v}) = 0.$$
Exemple
Soient \(A(1, 2)\), \(B(5, 4)\), \(C(-1, -1)\) et \(D(5, 2)\). Les droites \(\LineFr{AB}\) et \(\LineFr{CD}\) sont-elles parallèles ?
Les droites sont parallèles si leurs vecteurs directeurs sont colinéaires. Calculons les vecteurs et leur déterminant :$$ \Vect{AB} = \begin{pmatrix}5-1 \\
4-2\end{pmatrix} = \begin{pmatrix}4 \\
2\end{pmatrix}, \quad\Vect{CD} = \begin{pmatrix}5-(-1) \\
2-(-1)\end{pmatrix} = \begin{pmatrix}6 \\
3\end{pmatrix}. $$$$ \det(\Vect{AB},\,\Vect{CD}) =\begin{vmatrix}4 & 6 \\
2 & 3\end{vmatrix}= (4)(3) - (6)(2) = 12 - 12 = 0. $$Puisque le déterminant est nul, les vecteurs sont colinéaires, et par conséquent les droites \(\LineFr{AB}\) et \(\LineFr{CD}\) sont parallèles.