Vecteurs
Définition
Un téléphérique se déplace le long d'un câble de \(A\) à \(B\) :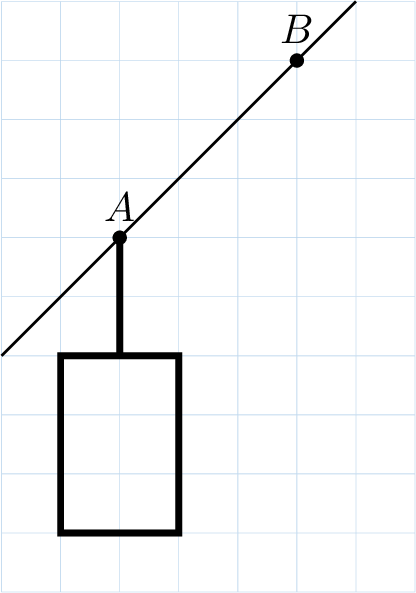
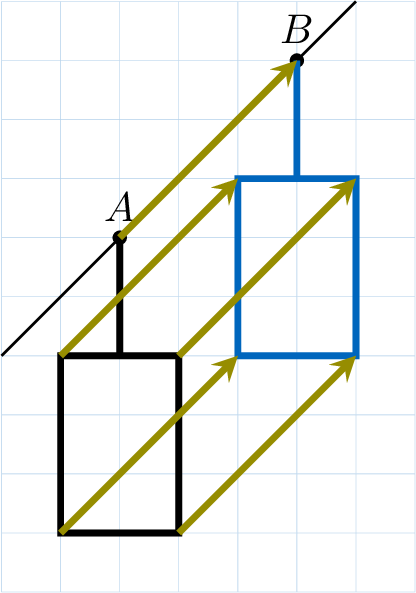
Déplacer une figure par translation, c'est la faire glisser sans la faire tourner. Pour décrire ce mouvement, on utilise une flèche \(\vec{u}\) appelée vecteur. Pour translater tous les points avec un vecteur, on peut utiliser :
- la longueur de la flèche, la direction et le sens de la flèche.
- le pas en \(x\) et le pas en \(y\) de la flèche (combien d'unités vers la droite/gauche et vers le haut/bas).
Définition Vecteur
Un vecteur \(\vec{u}\) peut se définir :
- Géométriquement, comme possédant une direction, un sens et une longueur.
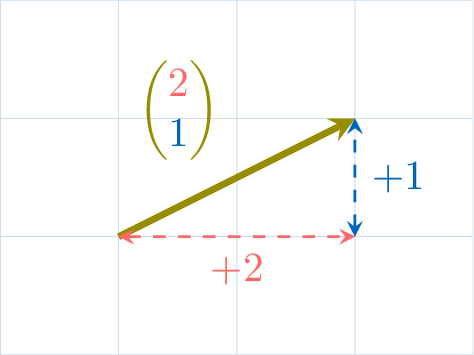
- Algébriquement, comme une paire de coordonnées \(\begin{pmatrix} \textcolor{colordef}{\text{pas en } x}\\\textcolor{colorprop}{\text{pas en } y}\end{pmatrix}\).
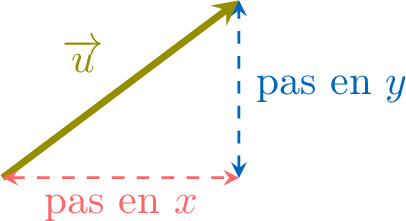
- Le pas en \(x\) est positif si le déplacement se fait vers la droite et négatif vers la gauche.
- Le pas en \(y\) est positif si le déplacement se fait vers le haut et négatif vers le bas.
Exemple
 \(\quad\quad\quad\)
\(\quad\quad\quad\) 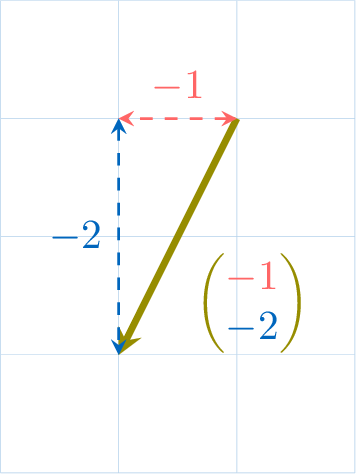
Notation à deux points
Définition Notation à deux points
Le vecteur allant de \(A\) à \(B\) peut s'écrire :
Proposition Coordonnées de \(\Vect{AB}\)
Soient deux points \(A(x_A ;\, y_A)\) et \(B(x_B ;\, y_B)\). Les coordonnées du vecteur \(\Vect{AB}\) sont :$$\Vect{AB} = \begin{pmatrix}x_B - x_A \\
y_B - y_A\end{pmatrix}$$Les coordonnées \(x_B - x_A\) et \(y_B - y_A\) correspondent exactement au pas en \(x\) et au pas en \(y\) pour aller de \(A\) à \(B\).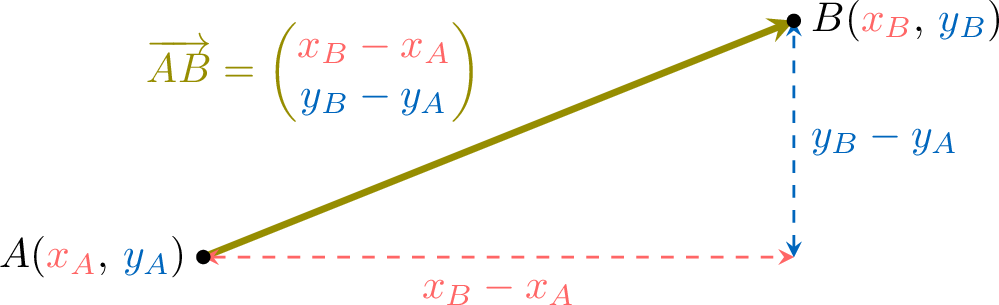
Égalité entre vecteurs
Deux vecteurs sont dits égaux s'ils représentent la même translation.
Définition Égalité géométrique de vecteurs
Deux vecteurs sont égaux s'ils ont :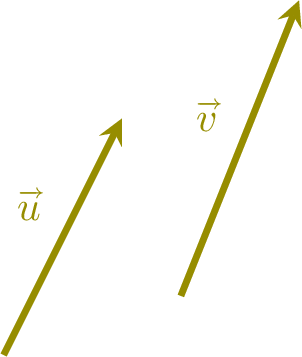
\(\textcolor{olive}{\Vect{u}} = \textcolor{olive}{\Vect{v}}\)
- la même direction (droites parallèles),
- le même sens (même orientation),
- et la même longueur (même norme).
\(\textcolor{olive}{\Vect{u}} = \textcolor{olive}{\Vect{v}}\)
Définition Égalité algébrique de vecteurs
Deux vecteurs \(\begin{pmatrix}x\\y\end{pmatrix}\) et \(\begin{pmatrix}x'\\y'\end{pmatrix}\) sont égaux si \(x = x'\) et \(y = y'\).
Proposition Critère du parallélogramme
Deux vecteurs \(\Vect{AB}\) et \(\Vect{DC}\) sont égaux si et seulement si \(ABCD\) est un parallélogramme (éventuellement aplati).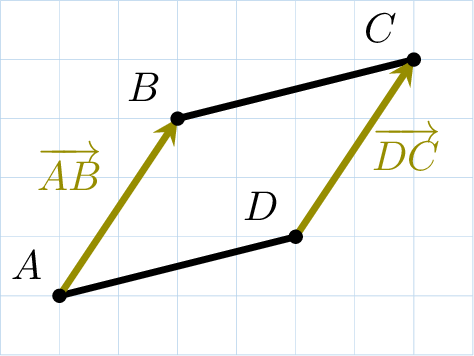
Addition
Supposons qu’on translate le point \(A\) vers \(B\), puis le point \(B\) vers \(C\).
C’est équivalent à translater directement le point \(A\) vers \(C\).
En langage vectoriel, cela s’écrit : \(\Vect{AB}+\Vect{BC}=\Vect{AC}\), où le signe \(+\) peut se lire « suivi de ».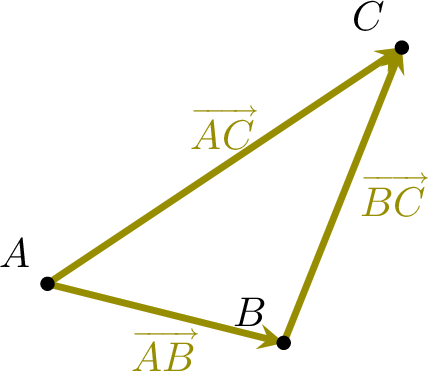
C’est équivalent à translater directement le point \(A\) vers \(C\).
En langage vectoriel, cela s’écrit : \(\Vect{AB}+\Vect{BC}=\Vect{AC}\), où le signe \(+\) peut se lire « suivi de ».
Définition Addition de vecteurs
On appelle somme de deux vecteurs \(\vec{u}\) et \(\vec{v}\), notée \(\vec{u}+ \vec{v}\), le vecteur associé à la translation composée des translations de vecteurs \(\vec{u}\) puis \(\vec{v}\).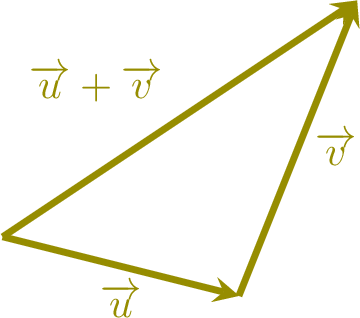
Définition Somme de deux vecteurs algébriques
$$\begin{pmatrix}x\\
y\end{pmatrix}+\begin{pmatrix}x'\\
y'\end{pmatrix}=\begin{pmatrix}x+x'\\
y +y' \\
\end{pmatrix}$$
Proposition Relation de Chasles
Pour tous points \(A\), \(B\), \(C\) :$$\Vect{AB} + \Vect{BC} = \Vect{AC}$$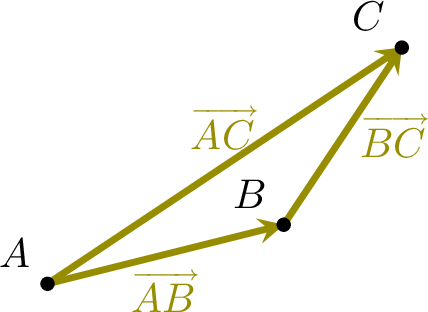
Définition Vecteur nul
Le vecteur associé à la translation qui transforme un point quelconque en lui-même est le vecteur nul, noté \(\Vect{0}\).$$\Vect{v} + \Vect{0} = \Vect{0} + \Vect{v} = \Vect{v}$$
Proposition Vecteur d'un point à lui-même
Pour tout point \(A\) :$$\Vect{AA} = \Vect{0}$$
Soustraction
Supposons que l’on translate le point \(A\) vers \(B\), puis le point \(B\) vers \(A\).
C’est équivalent à rester au point \(A\), c’est-à-dire, aucun déplacement global.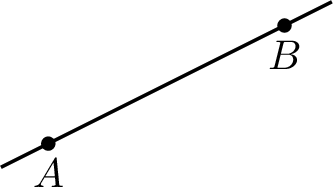
C’est équivalent à rester au point \(A\), c’est-à-dire, aucun déplacement global.
Définition Vecteur opposé
Le vecteur opposé à \(\vec{u}\) est le vecteur ayant la même direction, la même longueur, mais le sens opposé. On le note \(-\vec{u}\).
Définition Vecteur algébrique opposé
$$-\begin{pmatrix}x\\
y\end{pmatrix}=\begin{pmatrix}-x\\
-y \\
\end{pmatrix}$$
Proposition Vecteur opposé à \(\Vect{AB}\)
Le vecteur \(\Vect{BA}\) (de \(B\) vers \(A\)) est le vecteur opposé au vecteur \(\Vect{AB}\) (de \(A\) vers \(B\)) :$$\Vect{BA} = -\Vect{AB}$$
Soustraire un vecteur revient à additionner son opposé.
Définition Soustraction de vecteurs
La soustraction de vecteurs \(\Vect{u} - \Vect{v}\) se définit comme l'addition de l'opposé du second vecteur :$$\Vect{u}-\Vect{v} = \Vect{u} + (-\Vect{v})$$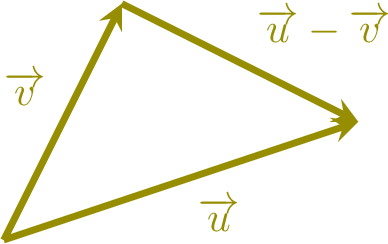
Exemple
Calcule \(\Vect{AB}-\Vect{CB}\).
$$\begin{aligned}\Vect{AB}-\Vect{CB} &= \Vect{AB} + (-\Vect{CB})\\
&= \Vect{AB} + \Vect{BC}\\
&= \Vect{AC}\end{aligned}$$
Définition Soustraction de deux vecteurs algébriques
$$\begin{pmatrix}x\\
y\end{pmatrix}-\begin{pmatrix}x'\\
y'\end{pmatrix}=\begin{pmatrix}x-x'\\
y-y' \\
\end{pmatrix}$$
Multiplication par un réel
Soit \(\Vect{v} = \begin{pmatrix} 2\\1\end{pmatrix}\). L’écriture \(2\Vect{v}\) signifie \(\Vect{v}+\Vect{v}\). Détermine les coordonnées des vecteurs suivants :
- \(\textcolor{olive}{2} \Vect{v}\)
- \(\textcolor{olive}{3} \Vect{v}\)
- \(\vdots\)
- \(\textcolor{olive}{k} \Vect{v}\)
- \(\begin{aligned}[t] \textcolor{olive}{2} \Vect{v} &= \Vect{v} + \Vect{v} \\ &= \begin{pmatrix} 2 \\ 1 \end{pmatrix} + \begin{pmatrix} 2 \\ 1 \end{pmatrix} \\ &= \begin{pmatrix} \textcolor{olive}{2} \times 2 \\ \textcolor{olive}{2} \times 1 \end{pmatrix} \\ &= \begin{pmatrix} 4 \\ 2 \end{pmatrix} \end{aligned}\)
- \(\begin{aligned}[t] \textcolor{olive}{3} \Vect{v} &= \Vect{v} + \Vect{v} + \Vect{v} \\ &= \begin{pmatrix} 2 \\ 1 \end{pmatrix} + \begin{pmatrix} 2 \\ 1 \end{pmatrix} + \begin{pmatrix} 2 \\ 1 \end{pmatrix} \\ &= \begin{pmatrix} \textcolor{olive}{3} \times 2 \\ \textcolor{olive}{3} \times 1 \end{pmatrix} \\ &= \begin{pmatrix} 6 \\ 3 \end{pmatrix} \end{aligned}\)
- \(\vdots\)
- \(\begin{aligned}[t] \textcolor{olive}{k} \Vect{v} &= \Vect{v} + \Vect{v} + \dots + \Vect{v} \quad \text{(\)k\( fois)} \\ &= \begin{pmatrix} 2 \\ 1 \end{pmatrix} + \begin{pmatrix} 2 \\ 1 \end{pmatrix} + \dots + \begin{pmatrix} 2 \\ 1 \end{pmatrix} \\ &= \begin{pmatrix} \textcolor{olive}{k} \times 2 \\ \textcolor{olive}{k} \times 1 \end{pmatrix} \end{aligned}\)
Définition Multiplication par un réel
Soit \(k\) un nombre réel. Le produit \(k\Vect{v}\) est défini par :$$k\begin{pmatrix}x\\
y\end{pmatrix}=\begin{pmatrix}kx\\
ky\end{pmatrix}$$
Remarque
- \(2\Vect{v}\) a la même direction et le même sens que \(\Vect{v}\), et est deux fois plus long.
- \(-2\Vect{v}\) a la même direction mais le sens opposé à \(\Vect{v}\), et est deux fois plus long.
- Si \(0 < k < 1\), le vecteur \(k\Vect{v}\) a la même direction et le même sens que \(\Vect{v}\), mais il est plus court.
- \(0\Vect{v} = \Vect{0}\), le vecteur nul.
Longueur d'un vecteur
D’après le théorème de Pythagore,
Proposition Longueur d'un vecteur
Si \(\Vect{v}=\begin{pmatrix}x\\y\end{pmatrix}\), la norme ou longueur de \(\Vect{v}\) est$$\|\Vect{v}\| = \sqrt{x^2 + y^2}$$
Exemple
Calcule la longueur du vecteur \(\Vect{v}=\begin{pmatrix}4\\3\end{pmatrix}\)
$$\begin{aligned}[t]\|\Vect{v}\| & = \sqrt{4^2 + 3^2} \\
& = \sqrt{16 + 9} \\
& = \sqrt{25} \\
& = 5\ \text{unités}\end{aligned}$$
Proposition Distance entre deux points
La distance entre deux points \(A(x_A, y_A)\) et \(B(x_B, y_B)\) du plan est la norme du vecteur \(\Vect{AB}\) :$$AB = \|\Vect{AB}\| = \sqrt{(x_B - x_A)^2 + (y_B - y_A)^2}$$
Exemple
Calcule la distance entre les points \(A(1;\ 2)\) et \(B(5;\ 5)\).
$$\begin{aligned}[t]AB &= \|\Vect{AB}\|\\
&= \sqrt{(x_B - x_A)^2 + (y_B - y_A)^2} \\
&= \sqrt{(5 - 1)^2 + (5 - 2)^2} \\
&= \sqrt{4^2 + 3^2} \\
&= \sqrt{16 + 9} \\
&= \sqrt{25} \\
&= 5\ \text{unités}\end{aligned}$$
Colinéarité
Définition Vecteurs colinéaires
Deux vecteurs \(\Vect{u}\) et \(\Vect{v}\) sont colinéaires s'il existe un réel \(k\) tel que :$$\Vect{u} = k \Vect{v}$$
Remarques
- Les coordonnées de deux vecteurs colinéaires sont proportionnelles.
- Le vecteur nul \(\Vect{0}\) est colinéaire à tout vecteur \(\Vect{u}\), car \(\Vect{0} = 0 \cdot \Vect{u}\).
Proposition Caractérisation vectorielle des droites parallèles
- Deux droites \(\LineFr{AB}\) et \(\LineFr{CD}\) sont parallèles si et seulement si les vecteurs \(\Vect{AB}\) et \(\Vect{CD}\) sont colinéaires.
- Trois points \(A\), \(B\) et \(C\) sont alignés si et seulement si les vecteurs \(\Vect{AB}\) et \(\Vect{AC}\) sont colinéaires.
Définition Déterminant de deux vecteurs
Soient \(\Vect{u} = \begin{pmatrix} x \\ y \end{pmatrix}\) et \(\Vect{v} = \begin{pmatrix} x' \\ y' \end{pmatrix}\) deux vecteurs du plan. Le déterminant de \(\Vect{u}\) et \(\Vect{v}\), noté \(\det(\Vect{u},\,\Vect{v})\), est défini par :$$\det(\Vect{u},\,\Vect{v}) =\begin{vmatrix}x & x' \\
y & y'\end{vmatrix}= x \cdot y' - y \cdot x'$$
Proposition Colinéarité et déterminant
Deux vecteurs \(\Vect{u}\) et \(\Vect{v}\) sont colinéaires si et seulement si$$\det(\Vect{u},\,\Vect{v}) = 0$$
Exemple
Soient \(A(1;\ 2)\), \(B(5;\ 4)\), \(C(-1;\ -1)\) et \(D(5;\ 2)\).
Les droites \(\LineFr{AB}\) et \(\LineFr{CD}\) sont-elles parallèles ?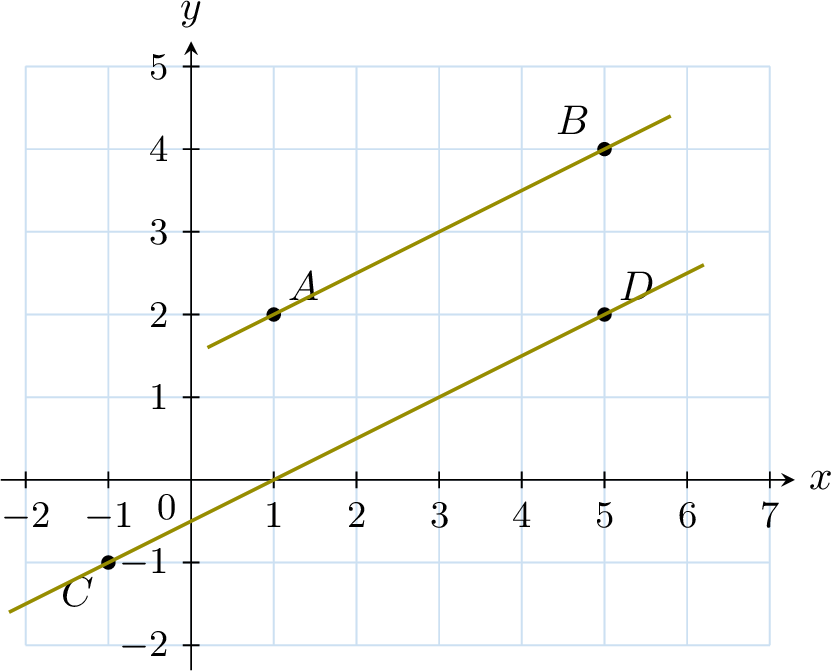
Les droites \(\LineFr{AB}\) et \(\LineFr{CD}\) sont-elles parallèles ?
Calculons les vecteurs :$$\Vect{AB} = \begin{pmatrix}5-1 \\
4-2\end{pmatrix} = \begin{pmatrix}4 \\
2\end{pmatrix}, \quad\Vect{CD} = \begin{pmatrix}5-(-1) \\
2-(-1)\end{pmatrix} = \begin{pmatrix}6 \\
3\end{pmatrix}$$Calculons le déterminant :$$\det(\Vect{AB},\,\Vect{CD}) =\begin{vmatrix}4 & 6 \\
2 & 3\end{vmatrix}= 4\times 3 - 6\times 2 = 12 - 12 = 0$$Les vecteurs sont donc colinéaires car \(\Vect{CD} = 1{,}5\,\Vect{AB}\), donc les droites \(\LineFr{AB}\) et \(\LineFr{CD}\) sont parallèles.
Conclusion
Dans ce chapitre, nous avons découvert le rôle fondamental des vecteurs pour décrire des déplacements et des positions dans le plan, aussi bien géométriquement qu’algébriquement. Leur puissance réside dans le lien qu’ils établissent entre le calcul algébrique et l’intuition géométrique, permettant de modéliser et de résoudre de nombreux problèmes en mathématiques et dans les sciences.
Les vecteurs sont omniprésents, bien au-delà de la géométrie. Dans l’intelligence artificielle et la science des données, par exemple, presque toutes les informations—images, textes, ou relations—sont codées sous forme de vecteurs. L’article de référence Attention is All You Need (Vaswani et al., 2017) le montre bien : les systèmes d’IA modernes, comme ChatGPT d’OpenAI ou Grok, manipulent d’immenses ensembles de vecteurs pour apprendre et prédire. Les auteurs écrivent ainsi :An attention function can be described as mapping a query and a set of key-value pairs to an output, where the query, keys, values, and output are all vectors. Maîtriser les vecteurs, c’est donc non seulement approfondir votre intuition géométrique et algébrique, mais aussi comprendre l’un des fondements mathématiques du monde numérique et de l’IA d’aujourd’hui.
Les vecteurs sont omniprésents, bien au-delà de la géométrie. Dans l’intelligence artificielle et la science des données, par exemple, presque toutes les informations—images, textes, ou relations—sont codées sous forme de vecteurs. L’article de référence Attention is All You Need (Vaswani et al., 2017) le montre bien : les systèmes d’IA modernes, comme ChatGPT d’OpenAI ou Grok, manipulent d’immenses ensembles de vecteurs pour apprendre et prédire. Les auteurs écrivent ainsi :