Vector Geometry of Lines and Planes
Vector Geometry of Lines
Definition Parallel (Collinear) Vectors
Two vectors \(\Vect{u}\) and \(\Vect{v}\) are parallel (or collinear) if one is a scalar multiple of the other. That is, if there exists a real number \(k\) such that:$$\Vect{u} = k \Vect{v}.$$
Proposition Alignment
Three points \(A, B\), and \(C\) are aligned if and only if the vectors \(\Vect{AB}\) and \(\Vect{AC}\) are collinear.
Definition Characterizing a Line
A line \(d\) is defined by a point \(A\) and a direction vector \(\Vect{u}\) (\(\Vect{u} \neq \Vect{0}\)). We denote it \(d(A, \Vect{u})\).
A point \(M\) belongs to \(d\) if there exists a real \(k\) such that \(\Vect{AM} = k\Vect{u}\).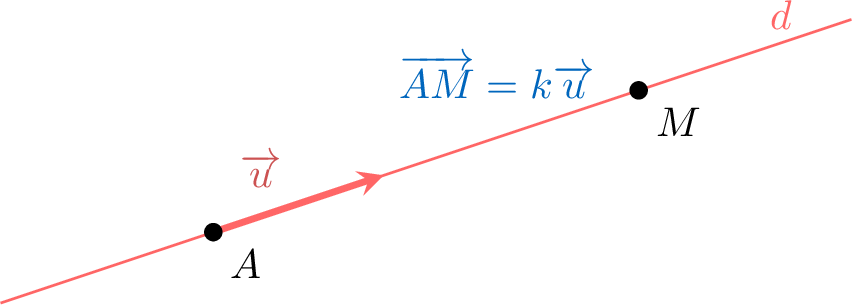
A point \(M\) belongs to \(d\) if there exists a real \(k\) such that \(\Vect{AM} = k\Vect{u}\).
Proposition Relative Position of Two Lines
Let \(d(A, \Vect{u})\) and \(d'(B, \Vect{v})\) be two lines in 3D space.
- If \(\Vect{u}\) and \(\Vect{v}\) are collinear, the lines are parallel (either strictly parallel or coincident).
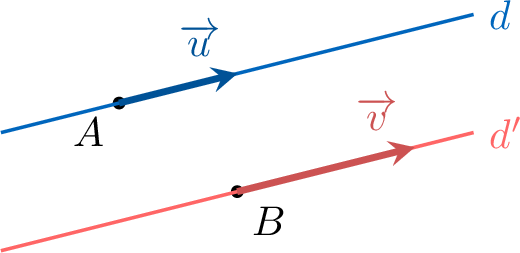
- If \(\Vect{u}\) and \(\Vect{v}\) are not collinear:
- They are secant if they have a common point (they are then coplanar).
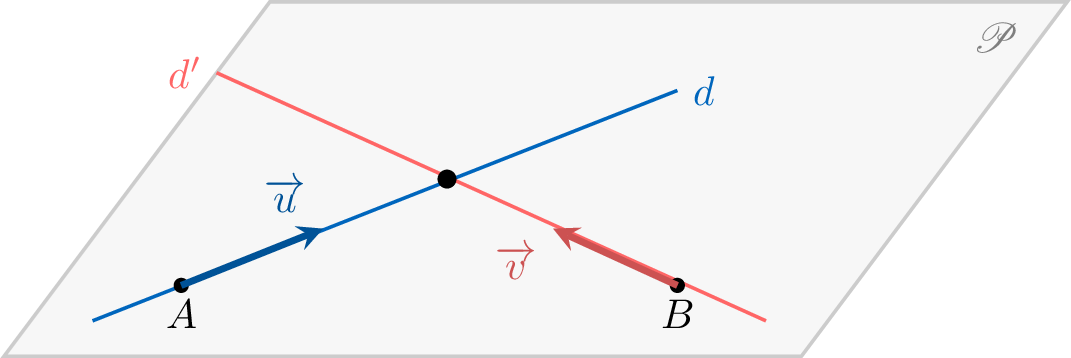
- They are skew (non-coplanar) if they have no common point.
- They are secant if they have a common point (they are then coplanar).
Vector Geometry of Planes
Definition Coplanar Vectors
Three vectors \(\Vect{u}, \Vect{v}\), and \(\Vect{w}\) are coplanar if one is a linear combination of the others. That is, if there exist real numbers \(x\) and \(y\) such that:$$\Vect{w} = x \Vect{u} + y \Vect{v}.$$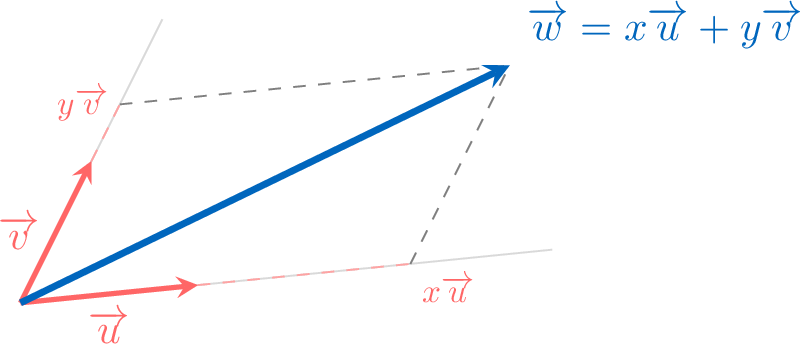
Proposition Coplanarity of Four Points
Four points \(A, B, C\), and \(D\) belong to the same plane if and only if the vectors \(\Vect{AB}, \Vect{AC}\), and \(\Vect{AD}\) are coplanar.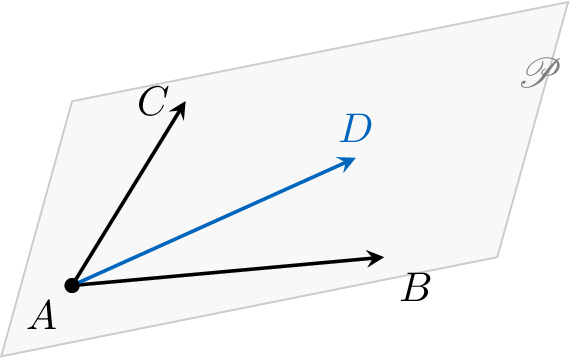
Definition Characterizing a Plane
A plane \(\mathscr{P}\) is defined by a point \(A\) and two non-collinear direction vectors \(\Vect{u}\) and \(\Vect{v}\). We denote it \(\mathscr{P}(A, \Vect{u}, \Vect{v})\). A point \(M\) belongs to \(\mathscr{P}\) if there exist reals \(x\) and \(y\) such that \(\Vect{AM} = x\Vect{u} + y\Vect{v}\).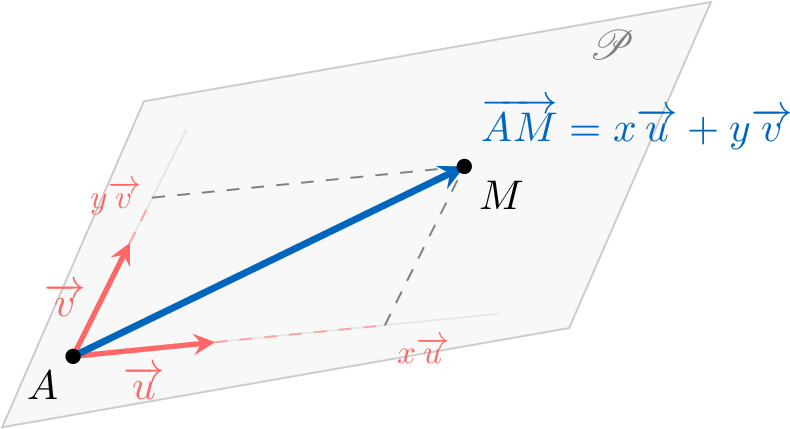
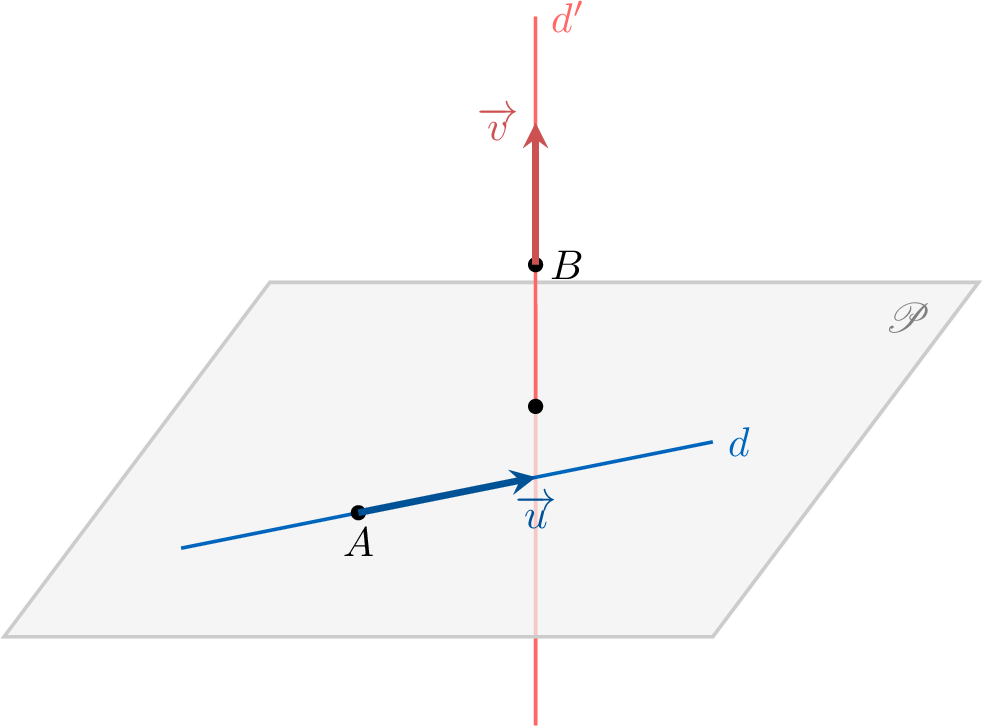
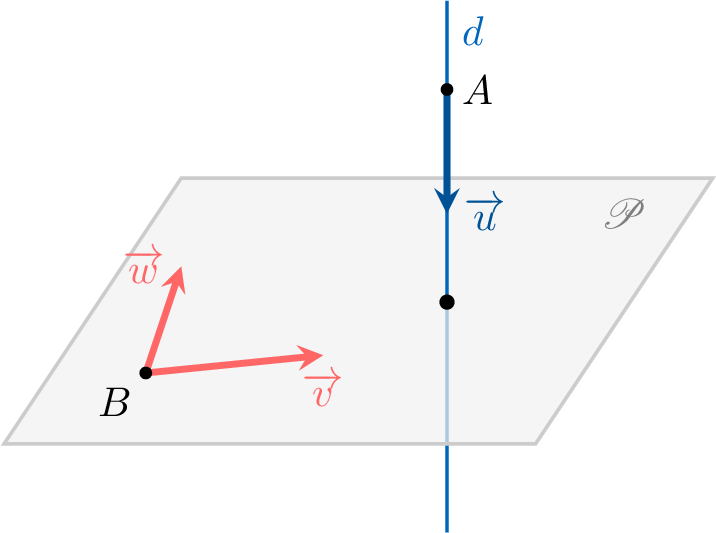
Proposition Relative Position of a Line and a Plane
Let \(d(A, \Vect{u})\) be a line and \(\mathscr{P}(B, \Vect{v}, \Vect{w})\) be a plane.
- The line \((d)\) is parallel to the plane \(\mathscr{P}\) if \(\Vect{u}, \Vect{v}\), and \(\Vect{w}\) are coplanar.
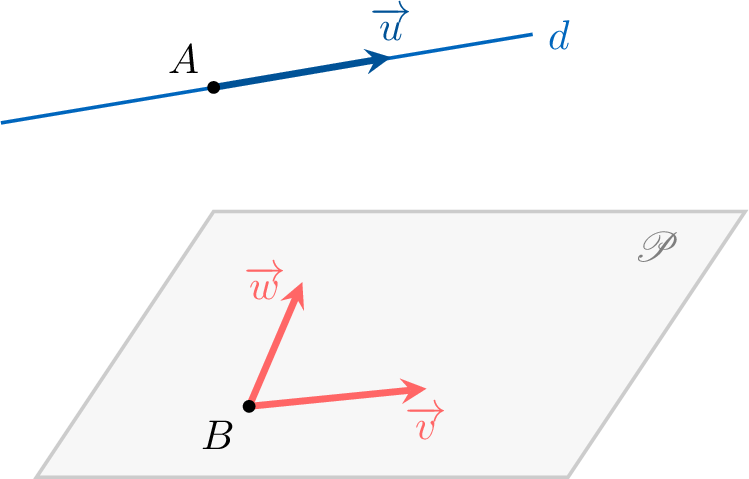
- Otherwise, the line and the plane are secant at exactly one point.
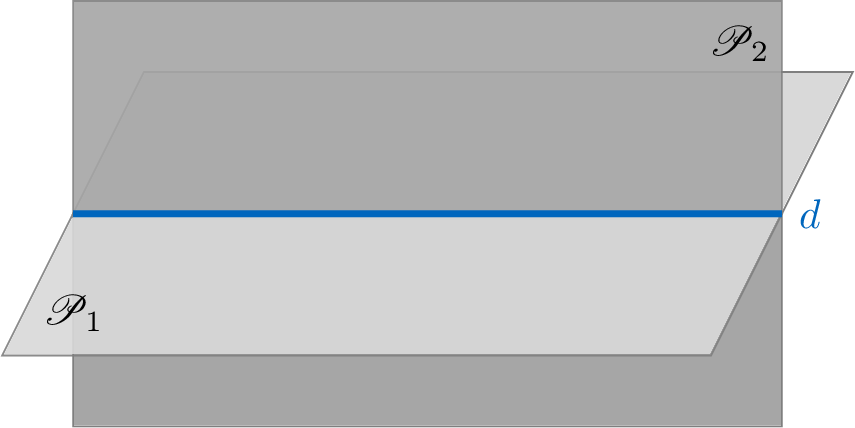
Proposition Relative Position of Two Planes
- Two planes are parallel if and only if the direction vectors of one are linear combinations of the direction vectors of the other.
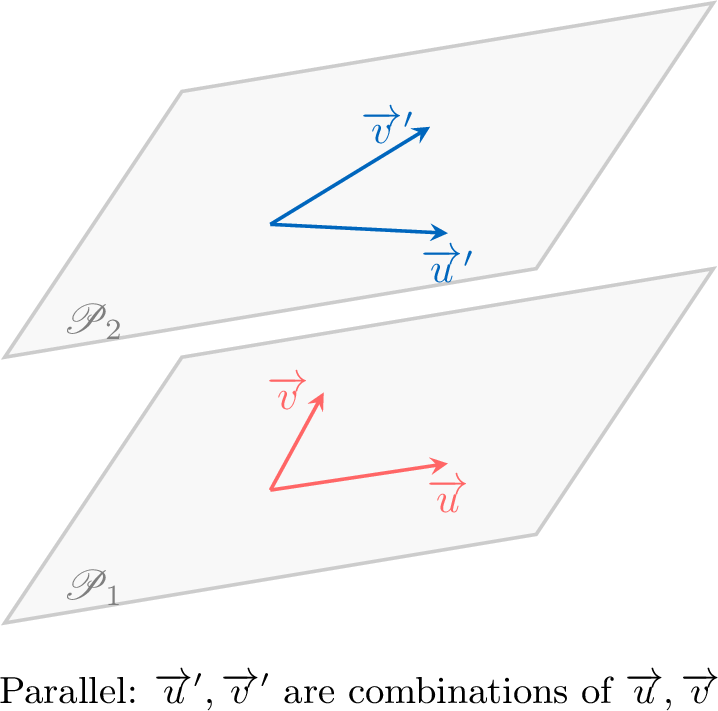
- Otherwise, they are secant, and their intersection is always a line.
Normal Vectors to a Plane
Definition Normal Vector
Given a plane \(\mathscr{P}\) defined by a point \(A\) and two direction vectors \(\Vect{u}\) and \(\Vect{v}\), a non-zero vector \(\Vect{n}\) is said to be normal to the plane if it is orthogonal to both \(\Vect{u}\) and \(\Vect{v}\).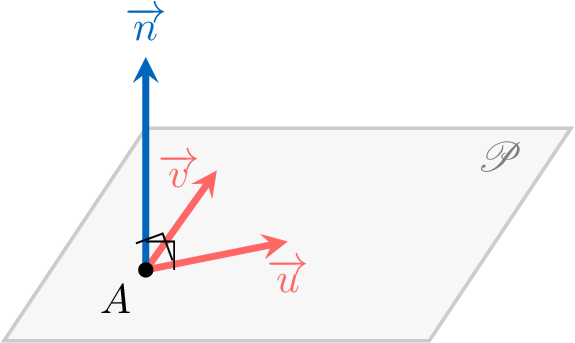
Proposition Perpendicular Planes
Two planes \(\mathscr{P}_1\) and \(\mathscr{P}_2\) are perpendicular if and only if their respective normal vectors \(\Vect{n_1}\) and \(\Vect{n_2}\) are orthogonal.$$\mathscr{P}_1 \perp \mathscr{P}_2 \iff \Vect{n_1} \cdot \Vect{n_2} = 0$$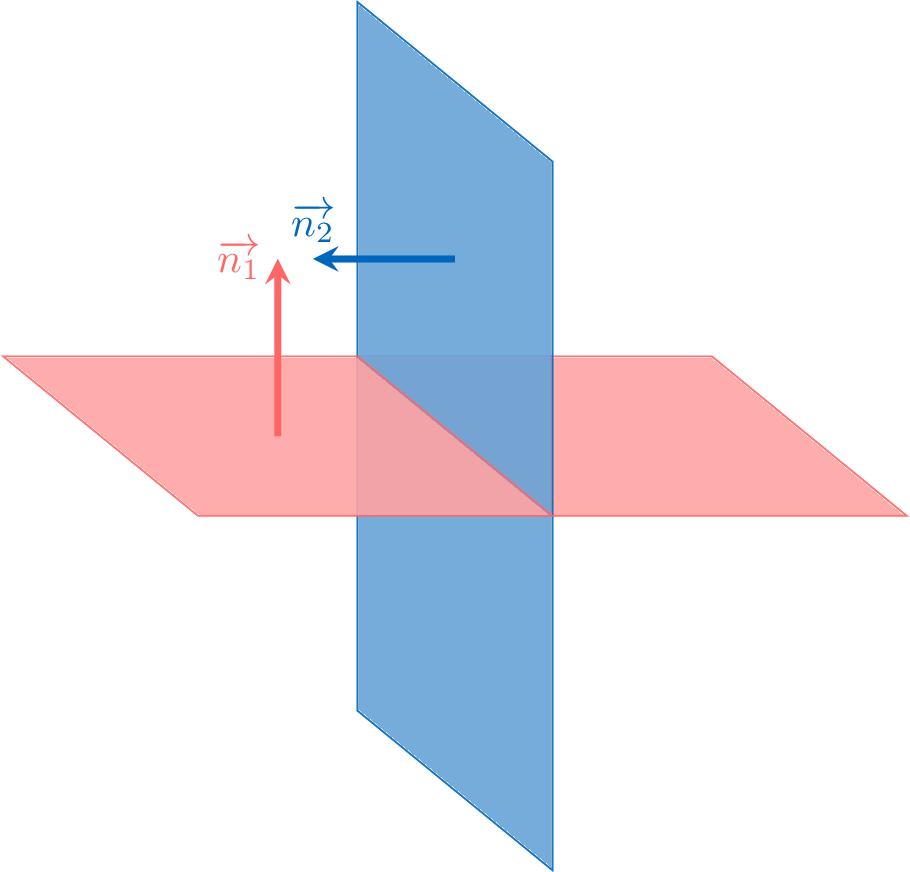
Example
In a cube \(ABCDEFGH\), consider the planes \(\mathscr{P}(A, \Vect{AB}, \Vect{AC})\) and \(\mathscr{P}(A, \Vect{AD}, \Vect{AE})\).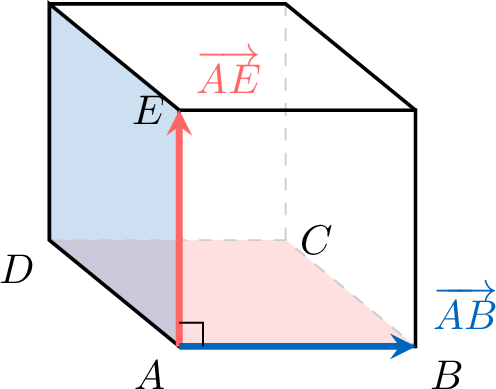
- A normal vector to plane \(\mathscr{P}(A, \Vect{AB}, \Vect{AC})\) is \(\Vect{AE}\) (since it is perpendicular to \(\Vect{AB}\) and \(\Vect{AC}\)).
- A normal vector to plane \(\mathscr{P}(A, \Vect{AD}, \Vect{AE})\) is \(\Vect{AB}\) (since it is perpendicular to edges \(\Vect{AD}\) and \(\Vect{AE}\)).
- Since \(ABCDEFGH\) is a cube, \(\Vect{AE} \cdot \Vect{AB} = 0\).
Cartesian Equation of a Plane
Proposition Cartesian Equation
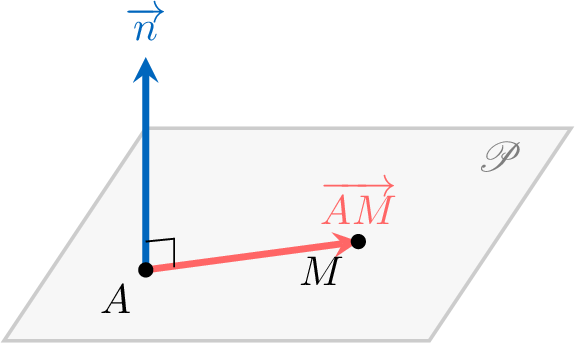
In an orthonormal coordinate system, the plane passing through point \(A(x_A, y_A, z_A)\) with a normal vector \(\Vect{n} = \begin{pmatrix} a \\ b \\ c \end{pmatrix}\) has a Cartesian equation of the form:$$ax + by + cz + d = 0$$where \((a, b, c) \neq (0, 0, 0)\) and \(d\) is a real constant.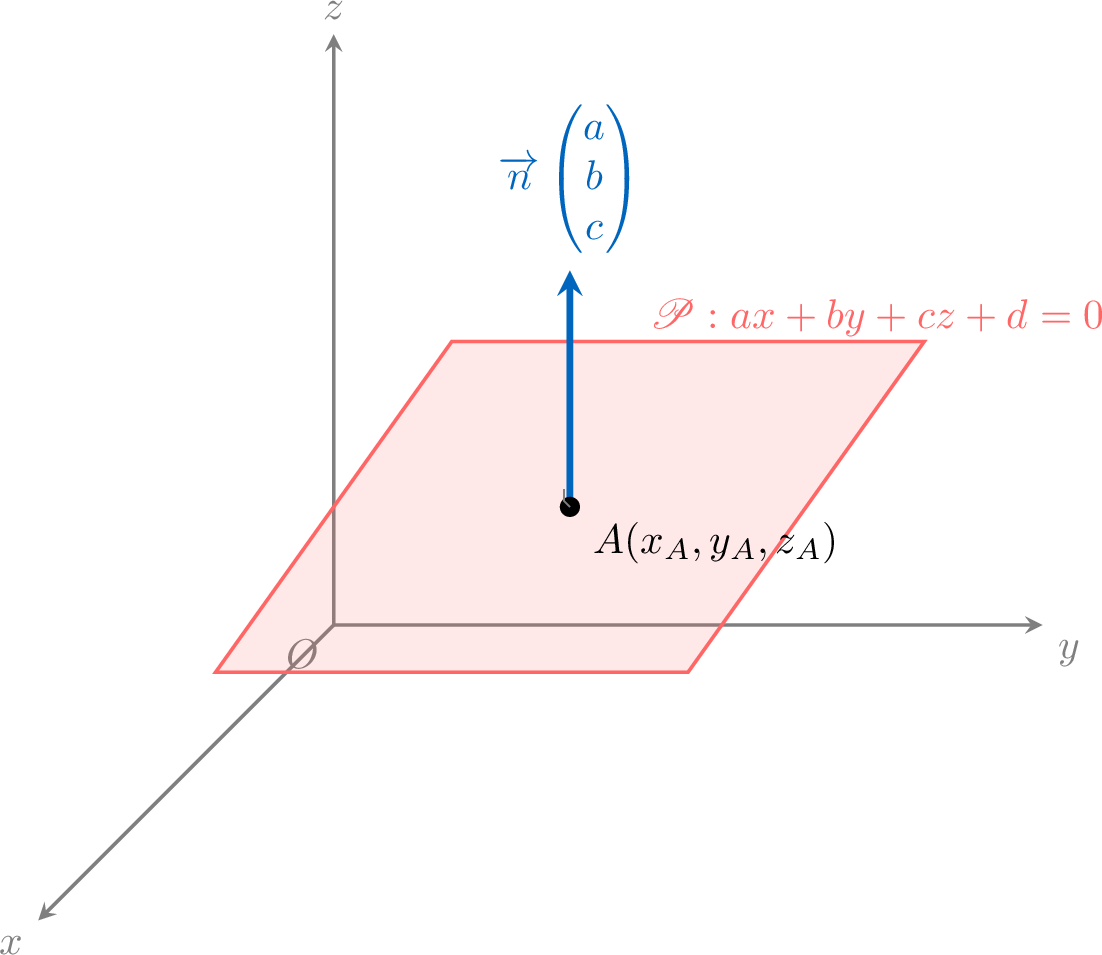
A point \(M(x, y, z)\) belongs to the plane if and only if \(\Vect{AM} \cdot \Vect{n} = 0\).$$ \begin{aligned}\Vect{AM} \cdot \Vect{n} = 0 &\iff a(x - x_A) + b(y - y_A) + c(z - z_A) = 0 \\
&\iff ax + by + cz - (ax_A + by_A + cz_A) = 0\end{aligned} $$By setting \(d = -(ax_A + by_A + cz_A)\), we obtain the form \(ax + by + cz + d = 0\).
Example
Find the Cartesian equation of the plane passing through \(A(-1, 2, 3)\) with normal vector \(\Vect{n}=\begin{pmatrix} 2 \\ -3 \\ 1 \end{pmatrix}\).
- Method 1: The equation is \(2x - 3y + z + d = 0\). Since \(A \in \mathscr{P}\): $$\begin{aligned} 2(-1) - 3(2) + 3 + d &= 0\\ -2 - 6 + 3 + d &= 0\\ d &= 5\end{aligned}$$Equation: \(2x - 3y + z + 5 = 0\).
- Method 2: $$\begin{aligned}\Vect{AM} \cdot \Vect{n} = 0 &\iff 2(x - (-1)) - 3(y - 2) + 1(z - 3) = 0\\ &\iff 2x - 3y + z + 5 = 0\end{aligned}$$
Distance from a Point to a Plane
Definition Orthogonal Projection
The orthogonal projection of a point \(M\) onto a plane \(\mathscr{P}\) is the point \(H\), where \(H\) is the intersection of the plane and the line passing through \(M\) perpendicular to \(\mathscr{P}\).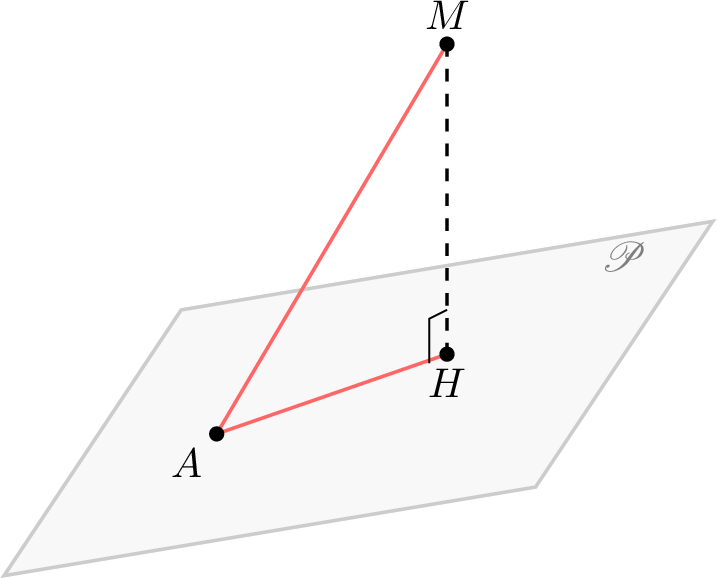
Definition Distance from a Point to a Set
The distance between a point \(M\) and a set of points \(\mathcal{S}\) is the minimum length \(MA\) among all possible points \(A\) belonging to \(\mathcal{S}\).
Proposition Shortest Distance
The distance from a point \(M\) to a plane \(\mathscr{P}\) is the length \(MH\), where \(H\) is the orthogonal projection of \(M\) onto \(\mathscr{P}\).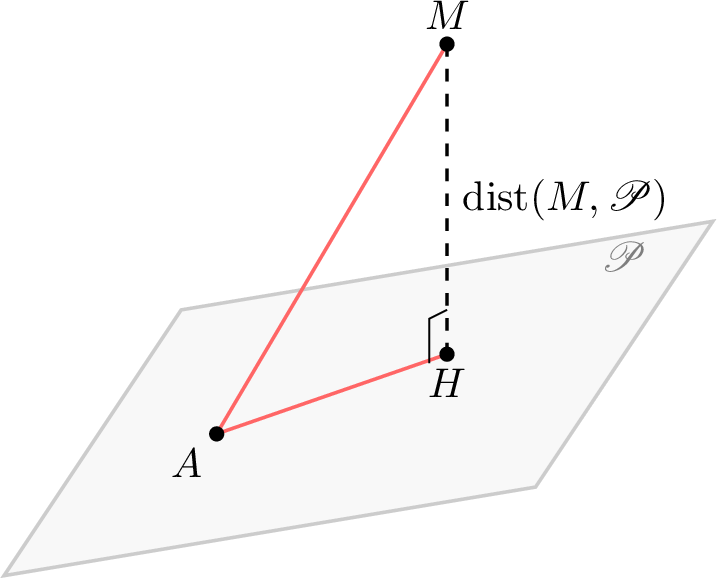
Let \(H\) be the orthogonal projection of point \(M\) onto the plane \(\mathscr{P}\), and let \(A\) be any point belonging to the plane. We can decompose the vector \(\Vect{MA}\) using Chasles' relation:$$\Vect{MA} = \Vect{MH} + \Vect{HA}$$By calculating the square of the norm (the scalar square), we obtain:$$ \begin{aligned}\|\Vect{MA}\|^2 &= (\Vect{MH} + \Vect{HA}) \cdot (\Vect{MH} + \Vect{HA}) \\
&= \|\Vect{MH}\|^2 + 2(\Vect{MH} \cdot \Vect{HA}) + \|\Vect{HA}\|^2\end{aligned} $$Since the line \((MH)\) is perpendicular to the plane \(\mathscr{P}\) and the vector \(\Vect{HA}\) lies within the plane, the vectors \(\Vect{MH}\) and \(\Vect{HA}\) are orthogonal. Their scalar product is therefore zero: \(\Vect{MH} \cdot \Vect{HA} = 0\). The expression simplifies to:$$\|\Vect{MA}\|^2 = \|\Vect{MH}\|^2 + \|\Vect{HA}\|^2$$Since \(\|\Vect{HA}\|^2 \geq 0\), it follows that \(\|\Vect{MA}\|^2 \geq \|\Vect{MH}\|^2\), and thus \(MA \geq MH\). This confirms that \(MH\) is the minimum distance between \(M\) and any point in the plane.